

Biomechanics and Medicine in Swimming XI
Biomechanics and Medicine in Swimming XI
Biomechanics and Medicine in Swimming XI

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
¾<br />
¾<br />
¾<br />
Methods<br />
A three-dimensional model of the f<strong>in</strong>-water system is proposed which<br />
is built on the follow<strong>in</strong>g assumptions. Based on cont<strong>in</strong>uum theory, a<br />
fluid-structure <strong>in</strong>teraction is developed with <strong>in</strong>ertial coupl<strong>in</strong>g. The system<br />
is depicted <strong>in</strong> Figure 1 <strong>and</strong> is composed of a solid doma<strong>in</strong> (ΩS )<br />
coupled with a surround<strong>in</strong>g fluid doma<strong>in</strong> (ΩF ). The boundary (Γ) ¾<br />
corresponds to the deformable fluid-structure <strong>in</strong>terface. The external<br />
excitation for the stroke motion (i.e. the rate of undulation) ¾ is assumed<br />
to be lower than the wave speed ¾ <strong>in</strong> the f<strong>in</strong>, so that the fluid can be ¾ de-<br />
¾<br />
scribed with the acoustic pressure (Mor<strong>and</strong> <strong>and</strong> Ohayon, 1995). It corresponds<br />
to an undulatory type of low frequency swimm<strong>in</strong>g. The f<strong>in</strong> is<br />
assumed to be a deformable elastic structure. Namely, the monof<strong>in</strong> is<br />
modelled us<strong>in</strong>g a multilayer structure, whose constitutive law is written<br />
by means of the Cauchy stress tensorσ<br />
. The imposed k<strong>in</strong>ematics at the<br />
lead<strong>in</strong>g edge of the monof<strong>in</strong> (that corresponds to the swimmer’s ankle)<br />
results <strong>in</strong> a volume force γ ie. If we denote by u the displacement field of<br />
the monof<strong>in</strong> <strong>and</strong> p pressure field with<strong>in</strong> the fluid doma<strong>in</strong>, the problem<br />
consists <strong>in</strong> f<strong>in</strong>d<strong>in</strong>g (u,p) solutions of the follow<strong>in</strong>g three-dimensional<br />
¾<br />
boundary value problem:<br />
¾<br />
r ∂ 2 u<br />
∂t 2 u<br />
=<br />
=<br />
divσ + γ ie<br />
0<br />
(ΩS )<br />
(Γ0 )<br />
(1)<br />
(2)<br />
σ.n = −pn (Γ) (3)<br />
∆p − 1<br />
2<br />
c0 ∂ 2 p<br />
∂t 2 = div(−r 0γ ie) (Ω F ) (4)<br />
∂p<br />
∂<br />
= −r0 ∂n<br />
2 u<br />
∂t 2 .n − r0γ ie.n (Γ1) (5)<br />
∂p<br />
= −r0γ ie.n (Γ) (6)<br />
∂n<br />
¾<br />
p = 0 (Γg ∪ Γs ∪ Γe) (7)<br />
xω(t) + zω<br />
γ ie =<br />
2 (t)<br />
0<br />
zω(t) − xω 2 ⎡<br />
⎤<br />
⎢<br />
⎥<br />
⎢<br />
⎥<br />
⎣<br />
⎢ (t) ⎦<br />
⎥<br />
Where c is the wave velocity <strong>in</strong> the fluid, r is the density of the mono-<br />
0 ¾<br />
f<strong>in</strong>, r is the fluid density <strong>and</strong> n is the unit outward normal to the f<strong>in</strong><br />
0<br />
doma<strong>in</strong>. The coupl<strong>in</strong>g results <strong>in</strong> a new term <strong>in</strong> the <strong>in</strong>ertial contribution of<br />
the system. Indeed, this added mass characterizes the energy transmission<br />
¾<br />
between the f<strong>in</strong> <strong>and</strong> the water. The specificity of the present method is that<br />
¾<br />
the temporal evolution ¾ of dynamical features is available. Namely, transient<br />
added mass, three-dimensional forces <strong>and</strong> torques at the po<strong>in</strong>t correspond<strong>in</strong>g<br />
to the swimmer’s ankle as well as energy balance are obta<strong>in</strong>ed.<br />
S<strong>in</strong>ce this result<strong>in</strong>g fluid-structure <strong>in</strong>teraction problem is too complex to<br />
be solved analytically, we analyzed us<strong>in</strong>g the means of numerical approximation.<br />
We will briefly outl<strong>in</strong>e the solution methodology used to solve<br />
the govern<strong>in</strong>g equations. The latter are solved with the F<strong>in</strong>ite Element<br />
Method us<strong>in</strong>g the commercial software COMSOL Multiphysics (Comsol<br />
Inc., Burl<strong>in</strong>gton, USA) . Numerical simulations are carried out for the<br />
fluid flow <strong>in</strong> a pool with the follow<strong>in</strong>g dimensions: In the pool, a f<strong>in</strong> with<br />
realistic dimensions (0.80 m chord <strong>and</strong> 0.50 wide) is located at the distance<br />
of 5 m from left wall. In this study a monolithic approach is used.<br />
Indeed, the equations govern<strong>in</strong>g the fluid flow <strong>and</strong> the displacement of the<br />
structure are solved simultaneously with s<strong>in</strong>gle solver. The ma<strong>in</strong> steps of<br />
the methodology are the follow<strong>in</strong>g: first, based on realistic pictures, the<br />
geometry of the monof<strong>in</strong> is created. The result<strong>in</strong>g volume, which is the<br />
form of an Initial Graphics Exchange Specification (IGES) file format,<br />
is then <strong>in</strong>put <strong>in</strong>to the commercial software COMSOL Multiphysics <strong>and</strong><br />
transformed to an unstructured volume mesh with triangular elements.<br />
The second step consists <strong>in</strong> the mesh<strong>in</strong>g. The f<strong>in</strong>al volume mesh (Figure<br />
1) consists of 6256 triangular elements for the f<strong>in</strong> <strong>and</strong> 128676 triangular<br />
elements for the water. The third step consists <strong>in</strong> a modal analysis of the<br />
three-dimensional coupled problem. γ ie is set to zero <strong>and</strong> a time harmonic<br />
solution of the problem is computed. This allows obta<strong>in</strong><strong>in</strong>g the fundamental<br />
vibration characteristics of the immersed monof<strong>in</strong> <strong>and</strong> therefore<br />
the quantitative <strong>and</strong> qualitative effect of the added mass can be po<strong>in</strong>ted<br />
out. The f<strong>in</strong>al step of the ¾ methodology consists <strong>in</strong> a transient analysis of<br />
propulsive forces. Thus, <strong>in</strong> the numerical experiments that are presented,<br />
the monof<strong>in</strong> is undergo<strong>in</strong>g time-dependent motion that comb<strong>in</strong>es translat<strong>in</strong>g<br />
<strong>and</strong> rotat<strong>in</strong>g motions as follows<br />
chaPter2.<strong>Biomechanics</strong><br />
ω(t) = θ0 s<strong>in</strong>(ω 0t +ψ) h(t) = h0 s<strong>in</strong>(ω 0t)<br />
with<br />
ω0 =1.7rad.s −1<br />
θ0 = π<br />
rad<br />
4<br />
π<br />
ψ =<br />
2 rad h0 = 3<br />
4 c<br />
<strong>in</strong> which c is the chord of the monof<strong>in</strong>. In the numerical experiments, c<br />
is set to 0.7m. The material properties used <strong>in</strong> the FEM simulation are<br />
given <strong>in</strong> Table 1.<br />
Table 1. Material characteristics used <strong>in</strong> the FEM simulation. E is the<br />
Young’s modulus, ν is the Poisson’s coefficient <strong>and</strong> r is the density of<br />
the monof<strong>in</strong>. (Data provided by Breier SAS company)<br />
¾<br />
E [Pa] ν<br />
r [kg.m<br />
¾<br />
¾<br />
¾ ¾<br />
¾ ¾<br />
¾<br />
−3 ]<br />
Carbon 12K<br />
146.10<br />
¾<br />
9<br />
0.32 1565<br />
Low density Polyethylene 146.10<br />
¾ ¾<br />
¾<br />
9<br />
0.38 920<br />
Rubber<br />
0,05.10<br />
¾ ¾<br />
¾<br />
9 0.49 1250<br />
Some of the key parameters associated with the performance of the<br />
monof<strong>in</strong> are the lift force L, the thrust ¾ force ¾ T (equal to negative drag<br />
force D) <strong>and</strong> the result<strong>in</strong>g torque at the swimmer’s. Thanks to the present<br />
FEM method, the accurate efforts (result<strong>in</strong>g force <strong>and</strong> result<strong>in</strong>g<br />
torque) at the po<strong>in</strong>t O, which corresponds to the swimmer ankle, are<br />
computed. The <strong>in</strong>stantaneous resultant force components are calculated<br />
by directly <strong>in</strong>tegrat<strong>in</strong>g the traction vector on the f<strong>in</strong> surface. In particular,<br />
if σ is the stress tensor <strong>and</strong> n is the outward normal unit to the f<strong>in</strong><br />
surface A, the resultant force is given by<br />
R(t) = ∫ σ.ndΓ<br />
= L(t).x + L(t).z<br />
A<br />
where T(t) <strong>and</strong> L(t) are the <strong>in</strong>stantaneous thrust force <strong>and</strong> <strong>in</strong>stantaneous<br />
lift force respectively. It known that the performance of flexible<br />
f<strong>in</strong>s depends largely on the effective dynamic properties of the structure.<br />
Therefore, ¾ modal analysis was performed <strong>in</strong> this work. This allowed for<br />
¾<br />
the quantification of the added mass effect on the f<strong>in</strong> by compar<strong>in</strong>g the<br />
natural frequencies <strong>and</strong> modal shapes <strong>in</strong> the case where the f<strong>in</strong> is submerged<br />
or not. The first natural frequencies fi = λi /2π are reported <strong>in</strong><br />
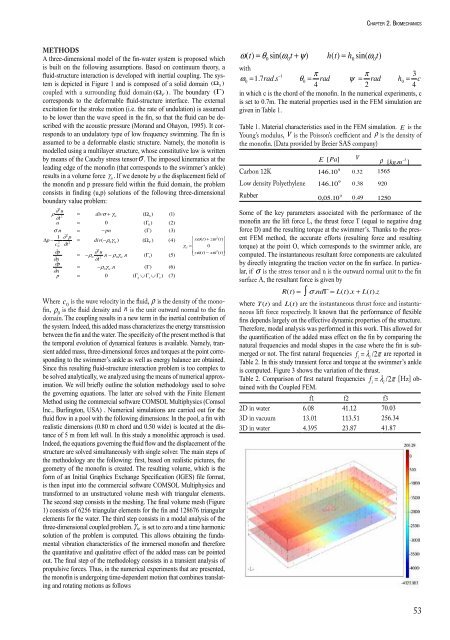
Table 2. In this study transient force <strong>and</strong> torque at the swimmer’s ankle<br />
is computed. Figure 3 shows the variation of the thrust.<br />
Table 2. Comparison of first natural frequencies fi = λi /2π [Hz] obta<strong>in</strong>ed<br />
with the Coupled FEM. ¾<br />
f1 f2 f3<br />
2D <strong>in</strong> water 6.08 41.12 70.03<br />
3D <strong>in</strong> vacuum 13.01 ¾ 113.51 256.34<br />
3D <strong>in</strong> water 4.395 23.87 41.87<br />
53














