Teor´ıa de Autómatas y Lenguajes Formales
Teor´ıa de Autómatas y Lenguajes Formales
Teor´ıa de Autómatas y Lenguajes Formales
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
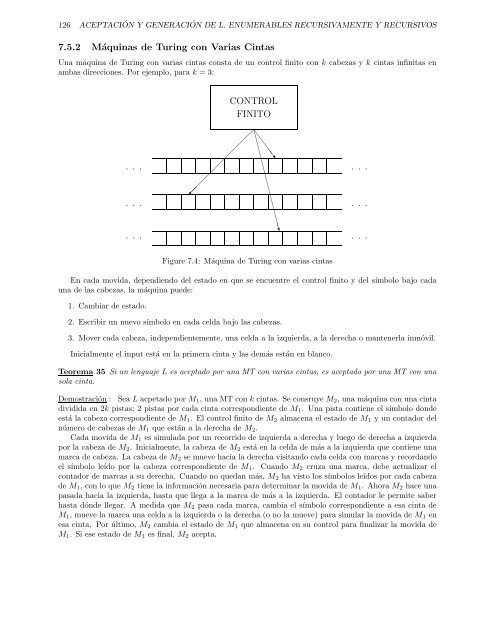
126ACEPTACIÓN Y GENERACIÓN DE L. ENUMERABLES RECURSIVAMENTE Y RECURSIVOS7.5.2 Máquinas <strong>de</strong> Turing con Varias CintasUna máquina <strong>de</strong> Turing con varias cintas consta <strong>de</strong> un control finito con k cabezas y k cintas infinitas enambas direcciones. Por ejemplo, para k = 3:CONTROLFINITO. . .. . .❙❈ ❈❈❈❈❈❈❈❈❈❈❈❈❲ ❙❙❙✇✠. . .. . .. . .. . .Figure 7.4: Máquina <strong>de</strong> Turing con varias cintasEn cada movida, <strong>de</strong>pendiendo <strong>de</strong>l estado en que se encuentre el control finito y <strong>de</strong>l símbolo bajo cadauna <strong>de</strong> las cabezas, la máquina pue<strong>de</strong>:1. Cambiar <strong>de</strong> estado.2. Escribir un nuevo símbolo en cada celda bajo las cabezas.3. Mover cada cabeza, in<strong>de</strong>pendientemente, una celda a la izquierda, a la <strong>de</strong>recha o mantenerla inmóvil.Inicialmente el input está en la primera cinta y las <strong>de</strong>más están en blanco.Teorema 35 Si un lenguaje L es aceptado por una MT con varias cintas, es aceptado por una MT con unasola cinta.Demostración : Sea L acpetado por M 1 , una MT con k cintas. Se consruye M 2 , una máquina con una cintadividida en 2k pistas; 2 pistas por cada cinta correspondiente <strong>de</strong> M 1 . Una pista contiene el símbolo don<strong>de</strong>está la cabeza correspondiente <strong>de</strong> M 1 . El control finito <strong>de</strong> M 2 almacena el estado <strong>de</strong> M 1 y un contador <strong>de</strong>lnúmero <strong>de</strong> cabezas <strong>de</strong> M 1 que están a la <strong>de</strong>recha <strong>de</strong> M 2 .Cada movida <strong>de</strong> M 1 es simulada por un recorrido <strong>de</strong> izquierda a <strong>de</strong>recha y luego <strong>de</strong> <strong>de</strong>recha a izquierdapor la cabeza <strong>de</strong> M 2 . Inicialmente, la cabeza <strong>de</strong> M 2 está en la celda <strong>de</strong> más a la izquierda que contiene unamarca <strong>de</strong> cabeza. La cabeza <strong>de</strong> M 2 se mueve hacia la <strong>de</strong>recha visitando cada celda con marcas y recordandoel símbolo leído por la cabeza correspondiente <strong>de</strong> M 1 . Cuando M 2 cruza una marca, <strong>de</strong>be actualizar elcontador <strong>de</strong> marcas a su <strong>de</strong>recha. Cuando no quedan más, M 2 ha visto los símbolos leídos por cada cabeza<strong>de</strong> M 1 , con lo que M 2 tiene la información necesaria para <strong>de</strong>terminar la movida <strong>de</strong> M 1 . Ahora M 2 hace unapasada hacia la izquierda, hasta que llega a la marca <strong>de</strong> más a la izquierda. El contador le permite saberhasta dón<strong>de</strong> llegar. A medida que M 2 pasa cada marca, cambia el símbolo correspondiente a esa cinta <strong>de</strong>M 1 , mueve la marca una celda a la izquierda o la <strong>de</strong>recha (o no la mueve) para simular la movida <strong>de</strong> M 1 enesa cinta. Por último, M 2 cambia el estado <strong>de</strong> M 1 que almacena en su control para finalizar la movida <strong>de</strong>M 1 . Si ese estado <strong>de</strong> M 1 es final, M 2 acepta.