

Fusion entre les données ultrasonores et les images de radioscopie ...
Fusion entre les données ultrasonores et les images de radioscopie ...
Fusion entre les données ultrasonores et les images de radioscopie ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
&KDSLWUH ,,, 7UDLWHPHQW DXWRPDWLTXH GHV GRQQpHV<br />
__________________________________________________________________________________________<br />
traitement détecte ce type <strong>de</strong> faux défaut. A l’œil, la distinction <strong>entre</strong> <strong>les</strong> <strong>de</strong>ux est possible<br />
puisque l’œil est sensible à la taille du défaut <strong>et</strong> ne distingue pas <strong>les</strong> points isolés dus au bruit<br />
<strong>de</strong> l’image. C’est la raison pour laquelle nous utilisons <strong>les</strong> <strong>de</strong>scripteurs <strong>de</strong> contraste <strong>et</strong> <strong>de</strong> taille<br />
<strong>de</strong>s obj<strong>et</strong>s. Les variations d’épaisseurs du cordon représentent un problème plus important<br />
puisque non seulement el<strong>les</strong> peuvent avoir un contraste élevé mais également une taille<br />
importante. Puisque ces variations apparaissent essentiellement sur <strong>les</strong> bords du cordon, nous<br />
utilisons également l’information <strong>de</strong> position <strong>de</strong> l’obj<strong>et</strong> par rapport au bord du cordon. Les<br />
paramètres d’élongation <strong>et</strong> d’orientation du défaut sont utilisés pour distinguer la nature du<br />
défaut <strong>et</strong> pour le processus <strong>de</strong> recalage avec <strong>les</strong> défauts détectés lors du contrôle ultrasonore.<br />
II.2.1. Contraste sur bruit d'un obj<strong>et</strong><br />
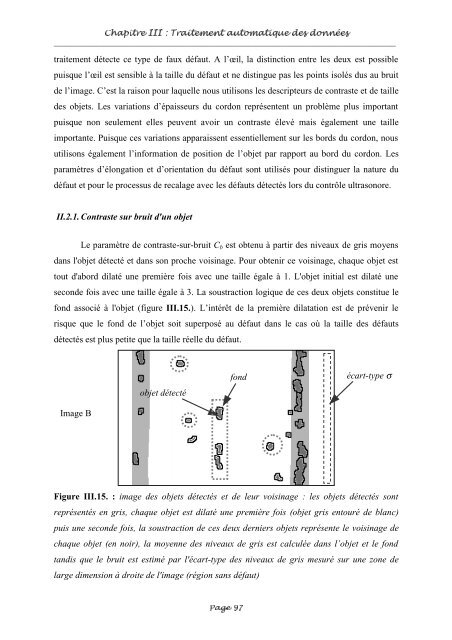
Le paramètre <strong>de</strong> contraste-sur-bruit C b est obtenu à partir <strong>de</strong>s niveaux <strong>de</strong> gris moyens<br />
dans l'obj<strong>et</strong> détecté <strong>et</strong> dans son proche voisinage. Pour obtenir ce voisinage, chaque obj<strong>et</strong> est<br />
tout d'abord dilaté une première fois avec une taille égale à 1. L'obj<strong>et</strong> initial est dilaté une<br />
secon<strong>de</strong> fois avec une taille égale à 3. La soustraction logique <strong>de</strong> ces <strong>de</strong>ux obj<strong>et</strong>s constitue le<br />
fond associé à l'obj<strong>et</strong> (figure III.15.). L’intérêt <strong>de</strong> la première dilatation est <strong>de</strong> prévenir le<br />
risque que le fond <strong>de</strong> l’obj<strong>et</strong> soit superposé au défaut dans le cas où la taille <strong>de</strong>s défauts<br />
détectés est plus p<strong>et</strong>ite que la taille réelle du défaut.<br />
obj<strong>et</strong> détecté<br />
fond<br />
écart-type σ<br />
Image B<br />
Figure III.15. : image <strong>de</strong>s obj<strong>et</strong>s détectés <strong>et</strong> <strong>de</strong> leur voisinage : <strong>les</strong> obj<strong>et</strong>s détectés sont<br />
représentés en gris, chaque obj<strong>et</strong> est dilaté une première fois (obj<strong>et</strong> gris entouré <strong>de</strong> blanc)<br />
puis une secon<strong>de</strong> fois, la soustraction <strong>de</strong> ces <strong>de</strong>ux <strong>de</strong>rniers obj<strong>et</strong>s représente le voisinage <strong>de</strong><br />
chaque obj<strong>et</strong> (en noir), la moyenne <strong>de</strong>s niveaux <strong>de</strong> gris est calculée dans l’obj<strong>et</strong> <strong>et</strong> le fond<br />
tandis que le bruit est estimé par l'écart-type <strong>de</strong>s niveaux <strong>de</strong> gris mesuré sur une zone <strong>de</strong><br />
large dimension à droite <strong>de</strong> l'image (région sans défaut)<br />
3DJH













