

Fusion entre les données ultrasonores et les images de radioscopie ...
Fusion entre les données ultrasonores et les images de radioscopie ...
Fusion entre les données ultrasonores et les images de radioscopie ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
&KDSLWUH ,,, 7UDLWHPHQW DXWRPDWLTXH GHV GRQQpHV<br />
__________________________________________________________________________________________<br />
(c’est-à-dire A ref - 6dB) <strong>de</strong> celle observée sur un défaut artificiel étalon (en général, il s'agit<br />
d'un trou <strong>de</strong> diamètre 1, 2, ou 3 mm). A l'issue <strong>de</strong> la segmentation, on mesure le nombre<br />
d'obj<strong>et</strong>s détectés par chaque traducteur correspondant soit à une fausse détection soit à l'un <strong>de</strong>s<br />
4 défauts artificiels. Les résultats, en terme <strong>de</strong> nombre total d'obj<strong>et</strong>s détectés sont présentés<br />
pour chacun <strong>de</strong>s 4 seuils sur la figure III.22.:<br />
N obj<strong>et</strong>s vrais défauts<br />
20<br />
4 défauts<br />
15<br />
4 défauts<br />
3 défauts<br />
10<br />
5<br />
3 défauts<br />
0<br />
S 1 S 2 S 3 S 4 Seuil<br />
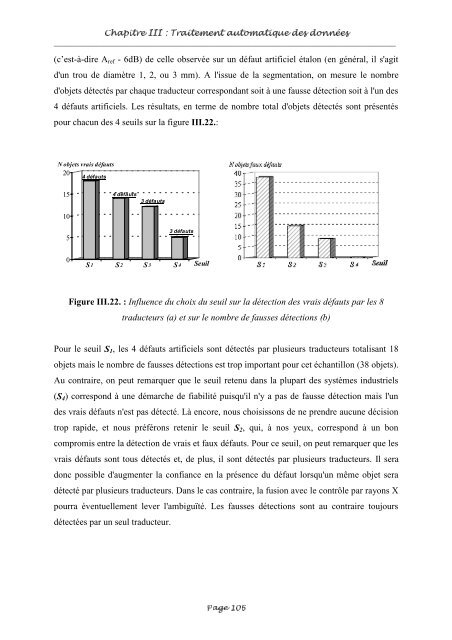
Figure III.22. : Influence du choix du seuil sur la détection <strong>de</strong>s vrais défauts par <strong>les</strong> 8<br />
traducteurs (a) <strong>et</strong> sur le nombre <strong>de</strong> fausses détections (b)<br />
Pour le seuil S 1 , <strong>les</strong> 4 défauts artificiels sont détectés par plusieurs traducteurs totalisant 18<br />
obj<strong>et</strong>s mais le nombre <strong>de</strong> fausses détections est trop important pour c<strong>et</strong> échantillon (38 obj<strong>et</strong>s).<br />
Au contraire, on peut remarquer que le seuil r<strong>et</strong>enu dans la plupart <strong>de</strong>s systèmes industriels<br />
(S 4 ) correspond à une démarche <strong>de</strong> fiabilité puisqu'il n'y a pas <strong>de</strong> fausse détection mais l'un<br />
<strong>de</strong>s vrais défauts n'est pas détecté. Là encore, nous choisissons <strong>de</strong> ne prendre aucune décision<br />
trop rapi<strong>de</strong>, <strong>et</strong> nous préférons r<strong>et</strong>enir le seuil S 2 , qui, à nos yeux, correspond à un bon<br />
compromis <strong>entre</strong> la détection <strong>de</strong> vrais <strong>et</strong> faux défauts. Pour ce seuil, on peut remarquer que <strong>les</strong><br />
vrais défauts sont tous détectés <strong>et</strong>, <strong>de</strong> plus, il sont détectés par plusieurs traducteurs. Il sera<br />
donc possible d'augmenter la confiance en la présence du défaut lorsqu'un même obj<strong>et</strong> sera<br />
détecté par plusieurs traducteurs. Dans le cas contraire, la fusion avec le contrôle par rayons X<br />
pourra éventuellement lever l'ambiguïté. Les fausses détections sont au contraire toujours<br />
détectées par un seul traducteur.<br />
3DJH













