

Fusion entre les données ultrasonores et les images de radioscopie ...
Fusion entre les données ultrasonores et les images de radioscopie ...
Fusion entre les données ultrasonores et les images de radioscopie ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
&KDSLWUH ,9 0RGpOLVDWLRQ GHV &RQQDLVVDQFHV HW IXVLRQ GHV GRQQpHV<br />
__________________________________________________________________________________________<br />
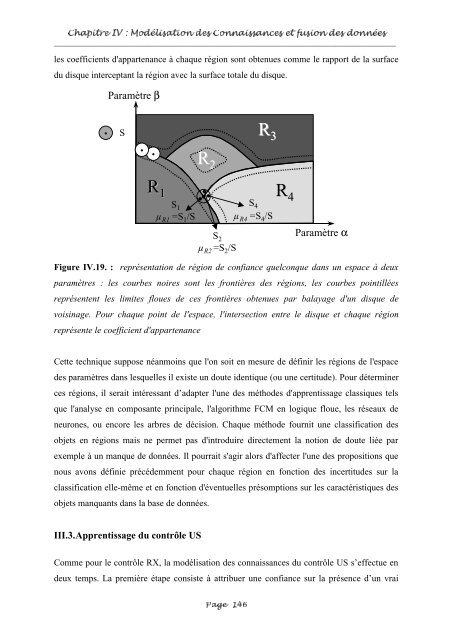
<strong>les</strong> coefficients d'appartenance à chaque région sont obtenues comme le rapport <strong>de</strong> la surface<br />
du disque interceptant la région avec la surface totale du disque.<br />
Paramètre β<br />
S<br />
R 3<br />
R 2<br />
R 1 R 4<br />
S 1<br />
µ R1 =S 1 /S<br />
S 2<br />
µ R2 =S 2 /S<br />
S 4<br />
µ R4 =S 4 /S<br />
Paramètre α<br />
Figure IV.19. : représentation <strong>de</strong> région <strong>de</strong> confiance quelconque dans un espace à <strong>de</strong>ux<br />
paramètres : <strong>les</strong> courbes noires sont <strong>les</strong> frontières <strong>de</strong>s régions, <strong>les</strong> courbes pointillées<br />
représentent <strong>les</strong> limites floues <strong>de</strong> ces frontières obtenues par balayage d'un disque <strong>de</strong><br />
voisinage. Pour chaque point <strong>de</strong> l'espace, l'intersection <strong>entre</strong> le disque <strong>et</strong> chaque région<br />
représente le coefficient d'appartenance<br />
C<strong>et</strong>te technique suppose néanmoins que l'on soit en mesure <strong>de</strong> définir <strong>les</strong> régions <strong>de</strong> l'espace<br />
<strong>de</strong>s paramètres dans <strong>les</strong>quel<strong>les</strong> il existe un doute i<strong>de</strong>ntique (ou une certitu<strong>de</strong>). Pour déterminer<br />
ces régions, il serait intéressant d’adapter l'une <strong>de</strong>s métho<strong>de</strong>s d'apprentissage classiques tels<br />
que l'analyse en composante principale, l'algorithme FCM en logique floue, <strong>les</strong> réseaux <strong>de</strong><br />
neurones, ou encore <strong>les</strong> arbres <strong>de</strong> décision. Chaque métho<strong>de</strong> fournit une classification <strong>de</strong>s<br />
obj<strong>et</strong>s en régions mais ne perm<strong>et</strong> pas d'introduire directement la notion <strong>de</strong> doute liée par<br />
exemple à un manque <strong>de</strong> <strong>données</strong>. Il pourrait s'agir alors d'affecter l'une <strong>de</strong>s propositions que<br />
nous avons définie précé<strong>de</strong>mment pour chaque région en fonction <strong>de</strong>s incertitu<strong>de</strong>s sur la<br />
classification elle-même <strong>et</strong> en fonction d'éventuel<strong>les</strong> présomptions sur <strong>les</strong> caractéristiques <strong>de</strong>s<br />
obj<strong>et</strong>s manquants dans la base <strong>de</strong> <strong>données</strong>.<br />
III.3. Apprentissage du contrôle US<br />
Comme pour le contrôle RX, la modélisation <strong>de</strong>s connaissances du contrôle US s’effectue en<br />
<strong>de</strong>ux temps. La première étape consiste à attribuer une confiance sur la présence d’un vrai<br />
3DJH













