

Fusion entre les données ultrasonores et les images de radioscopie ...
Fusion entre les données ultrasonores et les images de radioscopie ...
Fusion entre les données ultrasonores et les images de radioscopie ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
&KDSLWUH , *pQpUDOLWpV VXU OD IXVLRQ GH GRQQpHV<br />
__________________________________________________________________________________________<br />
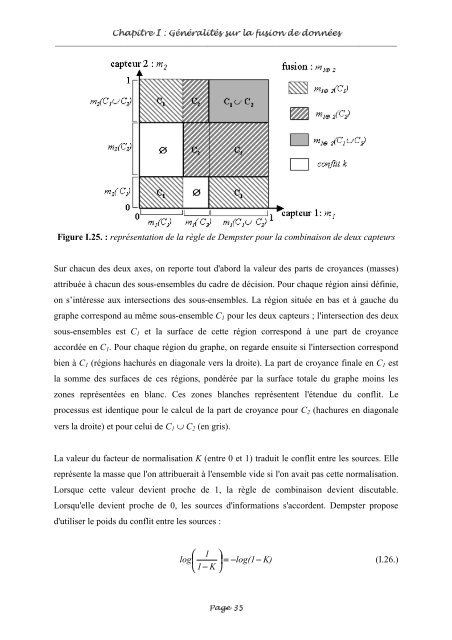
Figure I.25. : représentation <strong>de</strong> la règle <strong>de</strong> Dempster pour la combinaison <strong>de</strong> <strong>de</strong>ux capteurs<br />
Sur chacun <strong>de</strong>s <strong>de</strong>ux axes, on reporte tout d'abord la valeur <strong>de</strong>s parts <strong>de</strong> croyances (masses)<br />
attribuée à chacun <strong>de</strong>s sous-ensemb<strong>les</strong> du cadre <strong>de</strong> décision. Pour chaque région ainsi définie,<br />
on s’intéresse aux intersections <strong>de</strong>s sous-ensemb<strong>les</strong>. La région située en bas <strong>et</strong> à gauche du<br />
graphe correspond au même sous-ensemble C 1 pour <strong>les</strong> <strong>de</strong>ux capteurs ; l'intersection <strong>de</strong>s <strong>de</strong>ux<br />
sous-ensemb<strong>les</strong> est C 1 <strong>et</strong> la surface <strong>de</strong> c<strong>et</strong>te région correspond à une part <strong>de</strong> croyance<br />
accordée en C 1 . Pour chaque région du graphe, on regar<strong>de</strong> ensuite si l'intersection correspond<br />
bien à C 1 (régions hachurés en diagonale vers la droite). La part <strong>de</strong> croyance finale en C 1 est<br />
la somme <strong>de</strong>s surfaces <strong>de</strong> ces régions, pondérée par la surface totale du graphe moins <strong>les</strong><br />
zones représentées en blanc. Ces zones blanches représentent l'étendue du conflit. Le<br />
processus est i<strong>de</strong>ntique pour le calcul <strong>de</strong> la part <strong>de</strong> croyance pour C 2 (hachures en diagonale<br />
vers la droite) <strong>et</strong> pour celui <strong>de</strong> C 1 ∪ C 2 (en gris).<br />
La valeur du facteur <strong>de</strong> normalisation K (<strong>entre</strong> 0 <strong>et</strong> 1) traduit le conflit <strong>entre</strong> <strong>les</strong> sources. Elle<br />
représente la masse que l'on attribuerait à l'ensemble vi<strong>de</strong> si l'on avait pas c<strong>et</strong>te normalisation.<br />
Lorsque c<strong>et</strong>te valeur <strong>de</strong>vient proche <strong>de</strong> 1, la règle <strong>de</strong> combinaison <strong>de</strong>vient discutable.<br />
Lorsqu'elle <strong>de</strong>vient proche <strong>de</strong> 0, <strong>les</strong> sources d'informations s'accor<strong>de</strong>nt. Dempster propose<br />
d'utiliser le poids du conflit <strong>entre</strong> <strong>les</strong> sources :<br />
⎛ 1<br />
log⎜<br />
⎝ 1−<br />
K<br />
⎞<br />
⎟<br />
⎠<br />
= −log(1−<br />
K)<br />
(I.26.)<br />
3DJH













