

Fusion entre les données ultrasonores et les images de radioscopie ...
Fusion entre les données ultrasonores et les images de radioscopie ...
Fusion entre les données ultrasonores et les images de radioscopie ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
&KDSLWUH ,9 0RGpOLVDWLRQ GHV &RQQDLVVDQFHV HW IXVLRQ GHV GRQQpHV<br />
__________________________________________________________________________________________<br />
- limiter le temps <strong>de</strong> calcul <strong>de</strong>s paramètres lors du contrôle automatique<br />
- volonté d'intégrer <strong>les</strong> connaissances <strong>de</strong> l'expert lors <strong>de</strong> l'apprentissage<br />
- possibilité <strong>de</strong> conserver un maximum <strong>de</strong> vrais défauts sans la présence <strong>de</strong> fausses<br />
détections lorsqu'il n'y a pas <strong>de</strong> contrôle US (fiabilité du contrôle)<br />
- ai<strong>de</strong>r l'expert à i<strong>de</strong>ntifier <strong>les</strong> obj<strong>et</strong>s détectés<br />
- rechercher <strong>les</strong> informations complémentaires du contrôle US<br />
Les trois premiers éléments sont vérifiés <strong>et</strong> nous souhaitons maintenant combiner <strong>les</strong><br />
connaissances acquises précé<strong>de</strong>mment pour vérifier <strong>les</strong> trois suivants. Ces connaissances sont<br />
modélisées par <strong>de</strong>ux jeux <strong>de</strong> masses associés aux coup<strong>les</strong> <strong>de</strong> paramètres {Cb ; S} <strong>et</strong> {P RX ; E}.<br />
Nous proposons alors <strong>de</strong> combiner ces <strong>de</strong>ux jeux <strong>de</strong> masses en utilisant la règle <strong>de</strong><br />
combinaison <strong>de</strong> Dempster (cf Chapitre I ) :<br />
m<br />
) = m (A /C <strong>et</strong> S) ⊕ m (A /P <strong>et</strong> E)<br />
(IV.16.)<br />
RX<br />
obj<strong>et</strong><br />
(Ak<br />
obj<strong>et</strong> k b<br />
obj<strong>et</strong> k RX<br />
L'eff<strong>et</strong> <strong>de</strong> c<strong>et</strong>te combinaison est <strong>de</strong> conserver la confiance accordée à la présence d'un vrai<br />
défaut (attribuée à partir <strong>de</strong>s paramètres C b <strong>et</strong> S) tout en précisant sa nature à partir <strong>de</strong>s<br />
paramètres E <strong>et</strong> P RX .<br />
III.2.3.2.<br />
Illustration <strong>de</strong> la combinaison <strong>de</strong>s connaissances<br />
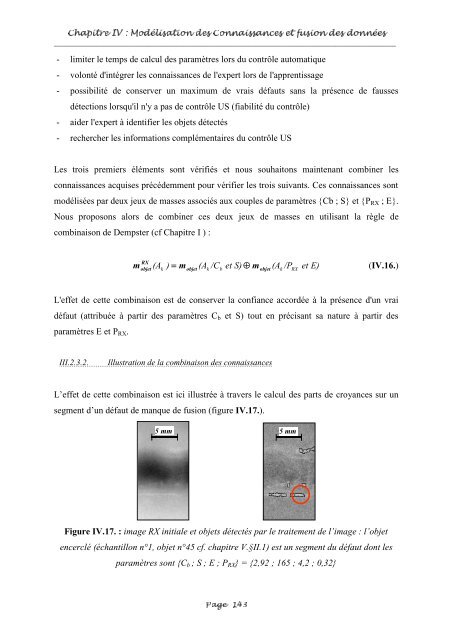
L’eff<strong>et</strong> <strong>de</strong> c<strong>et</strong>te combinaison est ici illustrée à travers le calcul <strong>de</strong>s parts <strong>de</strong> croyances sur un<br />
segment d’un défaut <strong>de</strong> manque <strong>de</strong> fusion (figure IV.17.).<br />
5 mm 5 mm<br />
Figure IV.17. : image RX initiale <strong>et</strong> obj<strong>et</strong>s détectés par le traitement <strong>de</strong> l’image : l’obj<strong>et</strong><br />
encerclé (échantillon n°1, obj<strong>et</strong> n°45 cf. chapitre V.§II.1) est un segment du défaut dont <strong>les</strong><br />
paramètres sont {C b ; S ; E ; P RX } = {2,92 ; 165 ; 4,2 ; 0,32}<br />
3DJH













