

Fusion entre les données ultrasonores et les images de radioscopie ...
Fusion entre les données ultrasonores et les images de radioscopie ...
Fusion entre les données ultrasonores et les images de radioscopie ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
&KDSLWUH ,9 0RGpOLVDWLRQ GHV &RQQDLVVDQFHV HW IXVLRQ GHV GRQQpHV<br />
__________________________________________________________________________________________<br />
Y<br />
X<br />
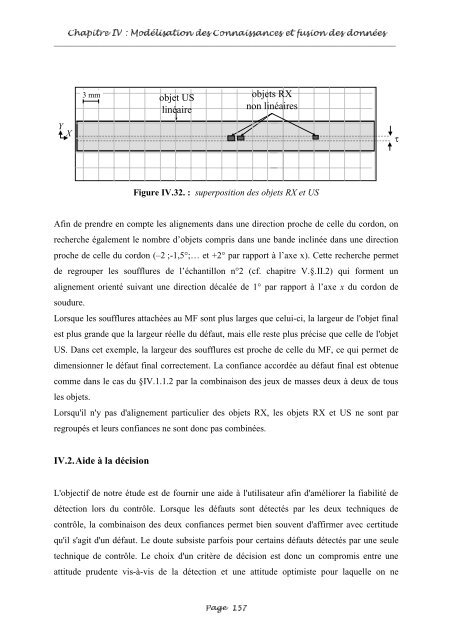
3 mm<br />
obj<strong>et</strong> US<br />
linéaire<br />
obj<strong>et</strong>s RX<br />
non linéaires<br />
τ<br />
Figure IV.32. : superposition <strong>de</strong>s obj<strong>et</strong>s RX <strong>et</strong> US<br />
Afin <strong>de</strong> prendre en compte <strong>les</strong> alignements dans une direction proche <strong>de</strong> celle du cordon, on<br />
recherche également le nombre d’obj<strong>et</strong>s compris dans une ban<strong>de</strong> inclinée dans une direction<br />
proche <strong>de</strong> celle du cordon (–2 ;-1,5°;… <strong>et</strong> +2° par rapport à l’axe x). C<strong>et</strong>te recherche perm<strong>et</strong><br />
<strong>de</strong> regrouper <strong>les</strong> soufflures <strong>de</strong> l’échantillon n°2 (cf. chapitre V.§.II.2) qui forment un<br />
alignement orienté suivant une direction décalée <strong>de</strong> 1° par rapport à l’axe x du cordon <strong>de</strong><br />
soudure.<br />
Lorsque <strong>les</strong> soufflures attachées au MF sont plus larges que celui-ci, la largeur <strong>de</strong> l'obj<strong>et</strong> final<br />
est plus gran<strong>de</strong> que la largeur réelle du défaut, mais elle reste plus précise que celle <strong>de</strong> l'obj<strong>et</strong><br />
US. Dans c<strong>et</strong> exemple, la largeur <strong>de</strong>s soufflures est proche <strong>de</strong> celle du MF, ce qui perm<strong>et</strong> <strong>de</strong><br />
dimensionner le défaut final correctement. La confiance accordée au défaut final est obtenue<br />
comme dans le cas du §IV.1.1.2 par la combinaison <strong>de</strong>s jeux <strong>de</strong> masses <strong>de</strong>ux à <strong>de</strong>ux <strong>de</strong> tous<br />
<strong>les</strong> obj<strong>et</strong>s.<br />
Lorsqu'il n'y pas d'alignement particulier <strong>de</strong>s obj<strong>et</strong>s RX, <strong>les</strong> obj<strong>et</strong>s RX <strong>et</strong> US ne sont par<br />
regroupés <strong>et</strong> leurs confiances ne sont donc pas combinées.<br />
IV.2. Ai<strong>de</strong> à la décision<br />
L'objectif <strong>de</strong> notre étu<strong>de</strong> est <strong>de</strong> fournir une ai<strong>de</strong> à l'utilisateur afin d'améliorer la fiabilité <strong>de</strong><br />
détection lors du contrôle. Lorsque <strong>les</strong> défauts sont détectés par <strong>les</strong> <strong>de</strong>ux techniques <strong>de</strong><br />
contrôle, la combinaison <strong>de</strong>s <strong>de</strong>ux confiances perm<strong>et</strong> bien souvent d'affirmer avec certitu<strong>de</strong><br />
qu'il s'agit d'un défaut. Le doute subsiste parfois pour certains défauts détectés par une seule<br />
technique <strong>de</strong> contrôle. Le choix d'un critère <strong>de</strong> décision est donc un compromis <strong>entre</strong> une<br />
attitu<strong>de</strong> pru<strong>de</strong>nte vis-à-vis <strong>de</strong> la détection <strong>et</strong> une attitu<strong>de</strong> optimiste pour laquelle on ne<br />
3DJH













