

Fusion entre les données ultrasonores et les images de radioscopie ...
Fusion entre les données ultrasonores et les images de radioscopie ...
Fusion entre les données ultrasonores et les images de radioscopie ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
&KDSLWUH ,,, 7UDLWHPHQW DXWRPDWLTXH GHV GRQQpHV<br />
__________________________________________________________________________________________<br />
est défini par une amplitu<strong>de</strong> A max , une position dans l’espace (X, Y, Z) <strong>et</strong> un volume<br />
d’incertitu<strong>de</strong> V :<br />
E i ={ A max , X, Y, Z, V }.<br />
(III.27.)<br />
III.1.2.6.<br />
Regroupement d’échos provenant d'un même défaut<br />
Parmi l’ensemble <strong>de</strong>s échos E i détectés lors du contrôle pour un traducteur donné, on souhaite<br />
i<strong>de</strong>ntifier ceux qui proviennent d’un même défaut afin <strong>de</strong> déterminer par la suite ses<br />
caractéristiques géométriques. Nous considérons alors que si <strong>de</strong>ux volumes élémentaires V<br />
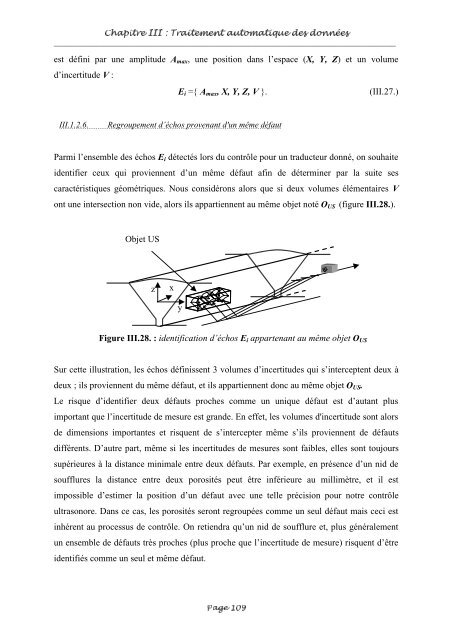
ont une intersection non vi<strong>de</strong>, alors ils appartiennent au même obj<strong>et</strong> noté O US (figure III.28.).<br />
Obj<strong>et</strong> US<br />
z<br />
x<br />
y<br />
Figure III.28. : i<strong>de</strong>ntification d’échos E i appartenant au même obj<strong>et</strong> O US<br />
Sur c<strong>et</strong>te illustration, <strong>les</strong> échos définissent 3 volumes d’incertitu<strong>de</strong>s qui s’interceptent <strong>de</strong>ux à<br />
<strong>de</strong>ux ; ils proviennent du même défaut, <strong>et</strong> ils appartiennent donc au même obj<strong>et</strong> O US .<br />
Le risque d’i<strong>de</strong>ntifier <strong>de</strong>ux défauts proches comme un unique défaut est d’autant plus<br />
important que l’incertitu<strong>de</strong> <strong>de</strong> mesure est gran<strong>de</strong>. En eff<strong>et</strong>, <strong>les</strong> volumes d'incertitu<strong>de</strong> sont alors<br />
<strong>de</strong> dimensions importantes <strong>et</strong> risquent <strong>de</strong> s’intercepter même s’ils proviennent <strong>de</strong> défauts<br />
différents. D’autre part, même si <strong>les</strong> incertitu<strong>de</strong>s <strong>de</strong> mesures sont faib<strong>les</strong>, el<strong>les</strong> sont toujours<br />
supérieures à la distance minimale <strong>entre</strong> <strong>de</strong>ux défauts. Par exemple, en présence d’un nid <strong>de</strong><br />
soufflures la distance <strong>entre</strong> <strong>de</strong>ux porosités peut être inférieure au millimètre, <strong>et</strong> il est<br />
impossible d’estimer la position d’un défaut avec une telle précision pour notre contrôle<br />
ultrasonore. Dans ce cas, <strong>les</strong> porosités seront regroupées comme un seul défaut mais ceci est<br />
inhérent au processus <strong>de</strong> contrôle. On r<strong>et</strong>iendra qu’un nid <strong>de</strong> soufflure <strong>et</strong>, plus généralement<br />
un ensemble <strong>de</strong> défauts très proches (plus proche que l’incertitu<strong>de</strong> <strong>de</strong> mesure) risquent d’être<br />
i<strong>de</strong>ntifiés comme un seul <strong>et</strong> même défaut.<br />
3DJH













