

Fusion entre les données ultrasonores et les images de radioscopie ...
Fusion entre les données ultrasonores et les images de radioscopie ...
Fusion entre les données ultrasonores et les images de radioscopie ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
&KDSLWUH ,,, 7UDLWHPHQW DXWRPDWLTXH GHV GRQQpHV<br />
__________________________________________________________________________________________<br />
C<strong>et</strong>te ambiguïté peut théoriquement être levée lorsque plusieurs traducteurs situés <strong>de</strong> part-<strong>et</strong>d’autre<br />
du défaut le détectent également. Au contraire, si le défaut est plan (très fin) le temps<br />
mesuré perm<strong>et</strong> <strong>de</strong> définir correctement sa position (figure III.24.b). Ceci est intéressant<br />
puisque <strong>les</strong> défauts plans situés sur le chanfrein correspon<strong>de</strong>nt à <strong>de</strong>s manques <strong>de</strong> fusion. Or,<br />
ce défaut est critique dans une soudure <strong>et</strong> il est donc important <strong>de</strong> le caractériser correctement.<br />
Finalement, pour chaque position du traducteur, on recueille un écho E défini par son<br />
amplitu<strong>de</strong> maximale <strong>et</strong> le temps <strong>de</strong> parcours <strong>de</strong> l’on<strong>de</strong> :<br />
E ={ A max , t écho }.<br />
(III.25.)<br />
III.1.2.5.<br />
Incertitu<strong>de</strong> sur l’origine d'un écho dans le repère du traducteur<br />
L'origine d'un écho dans le repère du traducteur R j est calculée à partir du temps <strong>de</strong> parcours<br />
t écho (cf. chapitre II §IV.3.2). Dans le chapitre II, nous avions défini l’incertitu<strong>de</strong> <strong>de</strong><br />
positionnement dans le repère du traducteur comme un volume élémentaire V déterminé par<br />
l’angle d’ouverture du faisceau ultrasonore <strong>et</strong> l’incertitu<strong>de</strong> sur la mesure du temps <strong>de</strong> parcours<br />
(Chapitre II §V.3.3).<br />
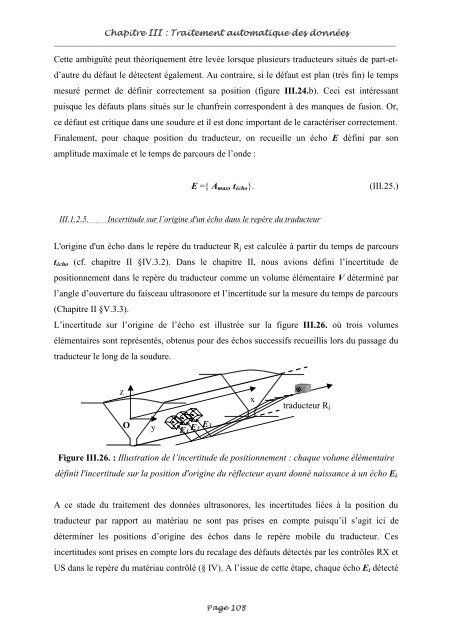
L’incertitu<strong>de</strong> sur l’origine <strong>de</strong> l’écho est illustrée sur la figure III.26. où trois volumes<br />
élémentaires sont représentés, obtenus pour <strong>de</strong>s échos successifs recueillis lors du passage du<br />
traducteur le long <strong>de</strong> la soudure.<br />
z<br />
x<br />
traducteur Rj<br />
O<br />
y<br />
E2<br />
E3<br />
E1<br />
Figure III.26. : Illustration <strong>de</strong> l’incertitu<strong>de</strong> <strong>de</strong> positionnement : chaque volume élémentaire<br />
définit l'incertitu<strong>de</strong> sur la position d'origine du réflecteur ayant donné naissance à un écho E i<br />
A ce sta<strong>de</strong> du traitement <strong>de</strong>s <strong>données</strong> <strong>ultrasonores</strong>, <strong>les</strong> incertitu<strong>de</strong>s liées à la position du<br />
traducteur par rapport au matériau ne sont pas prises en compte puisqu’il s’agit ici <strong>de</strong><br />
déterminer <strong>les</strong> positions d’origine <strong>de</strong>s échos dans le repère mobile du traducteur. Ces<br />
incertitu<strong>de</strong>s sont prises en compte lors du recalage <strong>de</strong>s défauts détectés par <strong>les</strong> contrô<strong>les</strong> RX <strong>et</strong><br />
US dans le repère du matériau contrôlé (§ IV). A l’issue <strong>de</strong> c<strong>et</strong>te étape, chaque écho E i détecté<br />
3DJH













