

Fusion entre les données ultrasonores et les images de radioscopie ...
Fusion entre les données ultrasonores et les images de radioscopie ...
Fusion entre les données ultrasonores et les images de radioscopie ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
&KDSLWUH ,, (WXGH GHV WHFKQLTXHV GH FRQWU{OH 5; HW 86<br />
__________________________________________________________________________________________<br />
compte que <strong>de</strong> la première source d’incertitu<strong>de</strong> lorsqu’il s’agira <strong>de</strong> positionner le défaut dans<br />
le repère du traducteur, <strong>et</strong> <strong>de</strong> l’ensemble <strong>de</strong>s <strong>de</strong>ux sources pour le regroupement <strong>de</strong> défauts<br />
détectés par plusieurs traducteurs dans le repère du matériau contrôlé.<br />
Le positionnement d’un défaut <strong>et</strong> le calcul d’incertitu<strong>de</strong> pour ces <strong>de</strong>ux sources sont décrits<br />
dans <strong>les</strong> paragraphes suivants. Pour cela nous définissons un repère mobile lié au traducteur<br />
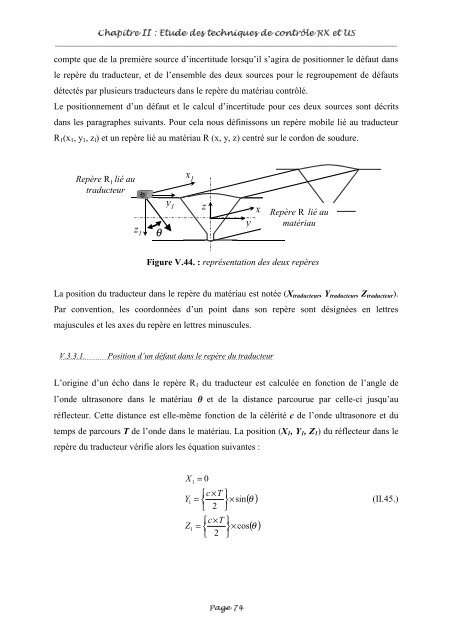
R 1 (x 1 , y 1 , z l ) <strong>et</strong> un repère lié au matériau R (x, y, z) centré sur le cordon <strong>de</strong> soudure.<br />
Repère R 1 lié au<br />
traducteur<br />
x 1<br />
z 1<br />
θ<br />
y 1<br />
z<br />
y<br />
x<br />
Repère R lié au<br />
matériau<br />
Figure V.44. : représentation <strong>de</strong>s <strong>de</strong>ux repères<br />
La position du traducteur dans le repère du matériau est notée (X traducteur , Y traducteur , Z traducteur ).<br />
Par convention, <strong>les</strong> coor<strong>données</strong> d’un point dans son repère sont désignées en l<strong>et</strong>tres<br />
majuscu<strong>les</strong> <strong>et</strong> <strong>les</strong> axes du repère en l<strong>et</strong>tres minuscu<strong>les</strong>.<br />
V.3.3.1.<br />
Position d’un défaut dans le repère du traducteur<br />
L’origine d’un écho dans le repère R 1 du traducteur est calculée en fonction <strong>de</strong> l’angle <strong>de</strong><br />
l’on<strong>de</strong> ultrasonore dans le matériau θ <strong>et</strong> <strong>de</strong> la distance parcourue par celle-ci jusqu’au<br />
réflecteur. C<strong>et</strong>te distance est elle-même fonction <strong>de</strong> la célérité c <strong>de</strong> l’on<strong>de</strong> ultrasonore <strong>et</strong> du<br />
temps <strong>de</strong> parcours T <strong>de</strong> l’on<strong>de</strong> dans le matériau. La position (X 1 , Y 1 , Z 1 ) du réflecteur dans le<br />
repère du traducteur vérifie alors <strong>les</strong> équation suivantes :<br />
X<br />
1<br />
= 0<br />
⎧ c×<br />
T<br />
Y1<br />
= ⎨<br />
⎩ 2<br />
⎧ c×<br />
T<br />
Z1<br />
= ⎨<br />
⎩ 2<br />
⎫<br />
⎬×<br />
⎭<br />
⎫<br />
⎬×<br />
⎭<br />
sin<br />
cos<br />
() θ<br />
() θ<br />
(II.45.)<br />
3DJH













