

Download - Scheib Elektrotechnik GmbH
Download - Scheib Elektrotechnik GmbH
Download - Scheib Elektrotechnik GmbH

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Feldorientierte (Vektor) Regelung<br />
Es gibt eine Vielzahl von Ausführungsformen der Vektorregelung.<br />
Der wesentliche Unterschied liegt darin, nach welchen<br />
Kriterien die Größen Wirkstrom, Magnetisierungsstrom (Fluß)<br />
und Drehmoment berechnet werden.<br />
Eine Gegenüberstellung der Gleichstrommaschine mit der<br />
Drehstrom-Asynchronmaschine (s. Abb. 3.07) zeigt die zu<br />
erwartenden Probleme. Bei der Gleichstrommaschine liegen<br />
durch die Anordnung der Feldwicklung und der Stellung der<br />
Bürsten, die für die Drehmomentbildung wichtigen Größen<br />
– Fluß (Φ) und Ankerstrom – nach Betrag und Phasenlage fest<br />
(Abb. 3.07a).<br />
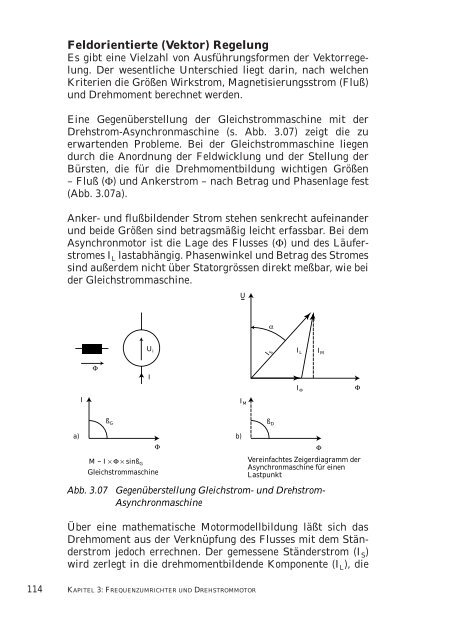
Anker- und flußbildender Strom stehen senkrecht aufeinander<br />
und beide Größen sind betragsmäßig leicht erfassbar. Bei dem<br />
Asynchronmotor ist die Lage des Flusses (Φ) und des Läuferstromes<br />
I L lastabhängig. Phasenwinkel und Betrag des Stromes<br />
sind außerdem nicht über Statorgrössen direkt meßbar, wie bei<br />
der Gleichstrommaschine.<br />
U<br />
α<br />
U i<br />
I S<br />
I L<br />
I M<br />
Φ<br />
I<br />
I Φ<br />
Φ<br />
I<br />
I M<br />
ß G<br />
ß D<br />
a) b)<br />
Φ<br />
M ~ I × Φ × sinß G<br />
Gleichstrommaschine<br />
Abb. 3.07<br />
Vereinfachtes Zeigerdiagramm der<br />
Asynchronmaschine für einen<br />
Lastpunkt<br />
Gegenüberstellung Gleichstrom- und Drehstrom-<br />
Asynchronmaschine<br />
Über eine mathematische Motormodellbildung läßt sich das<br />
Drehmoment aus der Verknüpfung des Flusses mit dem Ständerstrom<br />
jedoch errechnen. Der gemessene Ständerstrom (I S )<br />
wird zerlegt in die drehmomentbildende Komponente (I L ), die<br />
Φ<br />
114 KAPITEL 3: FREQUENZUMRICHTER UND DREHSTROMMOTOR
