

Download - Scheib Elektrotechnik GmbH
Download - Scheib Elektrotechnik GmbH
Download - Scheib Elektrotechnik GmbH

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
n<br />
n N<br />
n ref<br />
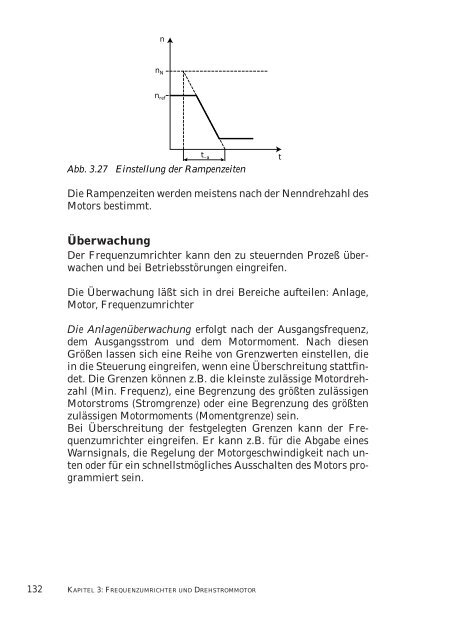
Abb. 3.27<br />
t –a<br />
Einstellung der Rampenzeiten<br />
t<br />
Die Rampenzeiten werden meistens nach der Nenndrehzahl des<br />
Motors bestimmt.<br />
Überwachung<br />
Der Frequenzumrichter kann den zu steuernden Prozeß überwachen<br />
und bei Betriebsstörungen eingreifen.<br />
Die Überwachung läßt sich in drei Bereiche aufteilen: Anlage,<br />
Motor, Frequenzumrichter<br />
Die Anlagenüberwachung erfolgt nach der Ausgangsfrequenz,<br />
dem Ausgangsstrom und dem Motormoment. Nach diesen<br />
Größen lassen sich eine Reihe von Grenzwerten einstellen, die<br />
in die Steuerung eingreifen, wenn eine Überschreitung stattfindet.<br />
Die Grenzen können z.B. die kleinste zulässige Motordrehzahl<br />
(Min. Frequenz), eine Begrenzung des größten zulässigen<br />
Motorstroms (Stromgrenze) oder eine Begrenzung des größten<br />
zulässigen Motormoments (Momentgrenze) sein.<br />
Bei Überschreitung der festgelegten Grenzen kann der Frequenzumrichter<br />
eingreifen. Er kann z.B. für die Abgabe eines<br />
Warnsignals, die Regelung der Motorgeschwindigkeit nach unten<br />
oder für ein schnellstmögliches Ausschalten des Motors programmiert<br />
sein.<br />
132 KAPITEL 3: FREQUENZUMRICHTER UND DREHSTROMMOTOR
