Prognosemetoder – en oversikt - Telenor
Prognosemetoder – en oversikt - Telenor
Prognosemetoder – en oversikt - Telenor

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
30<br />
Tidsrekke<br />
Forklaringsvariable<br />
Figur 7.1 Modellering<br />
^<br />
Observasjon<strong>en</strong>, y<br />
Prognosemodell<br />
Støy<br />
Det vi ikke greier<br />
å forklare<br />
Residualet, e<br />
^<br />
Modelltilpasning, y<br />
^<br />
der e = y - y<br />
Figur 7.2 Residualet, observasjon<strong>en</strong> og modelltilpasning<strong>en</strong><br />
y t<br />
Figur 7.3 En tidsrekke<br />
y t<br />
observasjon modell I<br />
Figur 7.4 Tidsrekk<strong>en</strong>, modell I av tidsrekk<strong>en</strong> og residual<strong>en</strong>e<br />
(støy<strong>en</strong>)<br />
t<br />
Før vi går nærmere inn på de ulike<br />
teknikk<strong>en</strong>e og test<strong>en</strong>e, skal vi se nærmere<br />
på hvorledes selve modellbygging<strong>en</strong><br />
foretas ved introduksjon av et<br />
sett med figurer.<br />
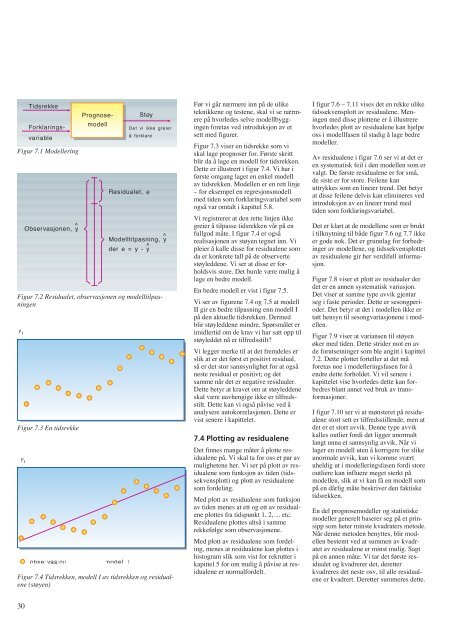
Figur 7.3 viser <strong>en</strong> tidsrekke som vi<br />
skal lage prognoser for. Første skritt<br />
blir da å lage <strong>en</strong> modell for tidsrekk<strong>en</strong>.<br />
Dette er illustrert i figur 7.4. Vi har i<br />
første omgang laget <strong>en</strong> <strong>en</strong>kel modell<br />
av tidsrekk<strong>en</strong>. Modell<strong>en</strong> er <strong>en</strong> rett linje<br />
<strong>–</strong> for eksempel <strong>en</strong> regresjonsmodell<br />
med tid<strong>en</strong> som forklaringsvariabel som<br />
også var omtalt i kapittel 5.8.<br />
Vi registrerer at d<strong>en</strong> rette linj<strong>en</strong> ikke<br />
greier å tilpasse tidsrekk<strong>en</strong> vår på <strong>en</strong><br />
fullgod måte. I figur 7.4 er også<br />
realisasjon<strong>en</strong> av støy<strong>en</strong> tegnet inn. Vi<br />
pleier å kalle disse for residual<strong>en</strong>e som<br />
da er konkrete tall på de observerte<br />
støyledd<strong>en</strong>e. Vi ser at disse er forholdsvis<br />
store. Det burde være mulig å<br />
lage <strong>en</strong> bedre modell.<br />
En bedre modell er vist i figur 7.5.<br />
Vi ser av figur<strong>en</strong>e 7.4 og 7.5 at modell<br />
II gir <strong>en</strong> bedre tilpasning <strong>en</strong>n modell I<br />
på d<strong>en</strong> aktuelle tidsrekk<strong>en</strong>. Dermed<br />
blir støyledd<strong>en</strong>e mindre. Spørsmålet er<br />
imidlertid om de krav vi har satt opp til<br />
støyleddet nå er tilfredsstilt?<br />
Vi legger merke til at det fremdeles er<br />
slik at er det først et positivt residual,<br />
så er det stor sannsynlighet for at også<br />
neste residual er positivt; og det<br />
samme når det er negative residualer.<br />
Dette betyr at kravet om at støyledd<strong>en</strong>e<br />
skal være uavh<strong>en</strong>gige ikke er tilfredsstilt.<br />
Dette kan vi også påvise ved å<br />
analysere autokorrelasjon<strong>en</strong>. Dette er<br />
vist s<strong>en</strong>ere i kapittelet.<br />
7.4 Plotting av residual<strong>en</strong>e<br />
Det finnes mange måter å plotte residual<strong>en</strong>e<br />
på. Vi skal ta for oss et par av<br />
mulighet<strong>en</strong>e her. Vi ser på plott av residual<strong>en</strong>e<br />
som funksjon av tid<strong>en</strong> (tidssekv<strong>en</strong>splott)<br />
og plott av residual<strong>en</strong>e<br />
som fordeling.<br />
Med plott av residual<strong>en</strong>e som funksjon<br />
av tid<strong>en</strong> m<strong>en</strong>es at ett og ett av residual<strong>en</strong>e<br />
plottes fra tidspunkt 1, 2, ... etc.<br />
Residual<strong>en</strong>e plottes altså i samme<br />
rekkefølge som observasjon<strong>en</strong>e.<br />
Med plott av residual<strong>en</strong>e som fordeling,<br />
m<strong>en</strong>es at residual<strong>en</strong>e kan plottes i<br />
histogram slik som vist for rekrutter i<br />
kapittel 5 for om mulig å påvise at residual<strong>en</strong>e<br />
er normalfordelt.<br />
I figur 7.6 <strong>–</strong> 7.11 vises det <strong>en</strong> rekke ulike<br />
tidssekv<strong>en</strong>splott av residual<strong>en</strong>e. M<strong>en</strong>ing<strong>en</strong><br />
med disse plott<strong>en</strong>e er å illustrere<br />
hvorledes plott av residual<strong>en</strong>e kan hjelpe<br />
oss i modellfas<strong>en</strong> til stadig å lage bedre<br />
modeller.<br />
Av residual<strong>en</strong>e i figur 7.6 ser vi at det er<br />
<strong>en</strong> systematisk feil i d<strong>en</strong> modell<strong>en</strong> som er<br />
valgt. De første residual<strong>en</strong>e er for små,<br />
de siste er for store. Feil<strong>en</strong>e kan<br />
uttrykkes som <strong>en</strong> lineær tr<strong>en</strong>d. Det betyr<br />
at disse feil<strong>en</strong>e delvis kan elimineres ved<br />
introduksjon av <strong>en</strong> lineær tr<strong>en</strong>d med<br />
tid<strong>en</strong> som forklaringsvariabel.<br />
Det er klart at de modell<strong>en</strong>e som er brukt<br />
i tilknytning til både figur 7.6 og 7.7 ikke<br />
er gode nok. Det er grunnlag for forbedringer<br />
av modell<strong>en</strong>e, og tidssekv<strong>en</strong>splottet<br />
av residual<strong>en</strong>e gir her verdifull informasjon.<br />
Figur 7.8 viser et plott av residualer der<br />
det er <strong>en</strong> ann<strong>en</strong> systematisk variasjon.<br />
Det viser at samme type avvik gj<strong>en</strong>tar<br />
seg i faste perioder. Dette er sesongperioder.<br />
Det betyr at det i modell<strong>en</strong> ikke er<br />
tatt h<strong>en</strong>syn til sesongvariasjon<strong>en</strong>e i modell<strong>en</strong>.<br />
Figur 7.9 viser at varians<strong>en</strong> til støy<strong>en</strong><br />
øker med tid<strong>en</strong>. Dette strider mot <strong>en</strong> av<br />
de forutsetninger som ble angitt i kapittel<br />
7.2. Dette plottet forteller at det må<br />
foretas noe i modelleringsfas<strong>en</strong> for å<br />
<strong>en</strong>dre dette forholdet. Vi vil s<strong>en</strong>ere i<br />
kapittelet vise hvorledes dette kan forbedres<br />
blant annet ved bruk av transformasjoner.<br />
I figur 7.10 ser vi at mønsteret på residual<strong>en</strong>e<br />
stort sett er tilfredsstill<strong>en</strong>de, m<strong>en</strong> at<br />
det er et stort avvik. D<strong>en</strong>ne type avvik<br />
kalles outlier fordi det ligger unormalt<br />
langt unna et sannsynlig avvik. Når vi<br />
lager <strong>en</strong> modell ut<strong>en</strong> å korrigere for slike<br />
unormale avvik, kan vi komme svært<br />
uheldig ut i modelleringsfas<strong>en</strong> fordi store<br />
outliere kan influere meget sterkt på<br />
modell<strong>en</strong>, slik at vi kan få <strong>en</strong> modell som<br />
på <strong>en</strong> dårlig måte beskriver d<strong>en</strong> faktiske<br />
tidsrekk<strong>en</strong>.<br />
En del prognosemodeller og statistiske<br />
modeller g<strong>en</strong>erelt baserer seg på et prinsipp<br />
som heter minste kvadraters metode.<br />
Når d<strong>en</strong>ne metod<strong>en</strong> b<strong>en</strong>yttes, blir modell<strong>en</strong><br />
bestemt ved at summ<strong>en</strong> av kvadratet<br />
av residual<strong>en</strong>e er minst mulig. Sagt<br />
på <strong>en</strong> ann<strong>en</strong> måte: Vi tar det første residualet<br />
og kvadrerer det, deretter<br />
kvadreres det neste osv, til alle residual<strong>en</strong>e<br />
er kvadrert. Deretter summeres dette.