Prognosemetoder – en oversikt - Telenor
Prognosemetoder – en oversikt - Telenor
Prognosemetoder – en oversikt - Telenor

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
46<br />
sess<strong>en</strong> har da konvergert, og vi har fått et<br />
sett med elem<strong>en</strong>ter i trafikkmatris<strong>en</strong> som<br />
er konsist<strong>en</strong>te med prognos<strong>en</strong>e for radog<br />
kolonnesummer.<br />
14.3 Kruithofs utvidede metode<br />
En utvidelse av Kruithofs metode vil<br />
være å også lage prognoser for <strong>en</strong>keltelem<strong>en</strong>t<strong>en</strong>e<br />
i trafikkmatris<strong>en</strong> og bruke disse<br />
som input isted<strong>en</strong>for sist observerte trafikkmatrise.<br />
Dette vil gi bedre resultater.<br />
En svakhet med metod<strong>en</strong> er dog at all<br />
vekt tillegges rad- og kolonnesumprognos<strong>en</strong>e.<br />
Disse <strong>en</strong>dres ikke under<br />
iterasjon<strong>en</strong> <strong>–</strong> kun de <strong>en</strong>kelte elem<strong>en</strong>ter i<br />
trafikkmatris<strong>en</strong>.<br />
14.4 Veiet minste<br />
kvadraters metode<br />
Disse modell<strong>en</strong>e er utviklet av Stordahl<br />
[41]. Som i kapittel 13.4 settes det opp et<br />
uttrykk der kvadratsummer mellom opprinnelige<br />
prognoser og de justerte prognoser<br />
skal minimaliseres. Dette skal<br />
gjøres under randbetingelse om at<br />
prognos<strong>en</strong>e for alle trafikkelem<strong>en</strong>ter er<br />
konsist<strong>en</strong>te med prognos<strong>en</strong>e for alle<br />
radsummer og med prognos<strong>en</strong> for alle<br />
kolonnesummer og med totalsumprognos<strong>en</strong>.<br />
Argum<strong>en</strong>tasjon<strong>en</strong> er at det er naturlig at<br />
alle prognos<strong>en</strong>e bør justeres noe <strong>–</strong> ikke<br />
bare prognos<strong>en</strong>e for de <strong>en</strong>kelte trafikkelem<strong>en</strong>ter.<br />
Det er rimelig at de ulike<br />
typer prognoser bør justeres relativt<br />
avh<strong>en</strong>gig av hvor stor prognoseusikkerhet<strong>en</strong><br />
er. Det vil ikke her bli pres<strong>en</strong>tert<br />
formler som r<strong>en</strong>t matematisk beskriver<br />
optimeringssituasjon<strong>en</strong>. D<strong>en</strong> vil imidlertid<br />
være forholdsvis lik d<strong>en</strong> som er<br />
beskrevet ved likning (13.1) og (13.2) i<br />
kapittel 13.4, m<strong>en</strong> med flere likninger<br />
som randbetingelser. Til hver kvadratsum<br />
allokeres det <strong>en</strong> vekt. Et aktuelt valg av<br />
vekter kan være å velge dem lik d<strong>en</strong><br />
inverse av varians<strong>en</strong> til prognos<strong>en</strong>.<br />
Løsning<strong>en</strong> på optimering<strong>en</strong> finnes ved å<br />
b<strong>en</strong>ytte Lagranges multiplikatormetode.<br />
For <strong>en</strong> trafikkmatrise med dim<strong>en</strong>sjon n<br />
fører dette til at det må løses et likningssystem<br />
med n(n + 3) + 2 ukj<strong>en</strong>te. Dette<br />
kan ikke gjøres for hånd, m<strong>en</strong> må gjøres<br />
maskinelt.<br />
I samarbeid med Norsk Regnes<strong>en</strong>tral er<br />
det utviklet <strong>en</strong> programpakke som inneholder<br />
de nevnte metoder for prognostisering<br />
av trafikkmatriser. Her løses det<br />
nevnte likningssystemet numerisk i selve<br />
programpakk<strong>en</strong>.<br />
I <strong>en</strong>kelte situasjoner kan det være slik at<br />
vi har spesiell kunnskap om <strong>en</strong>kelte av<br />
elem<strong>en</strong>t<strong>en</strong>e i trafikkmatris<strong>en</strong>. Det kan<br />
være elem<strong>en</strong>ter der vi vet at trafikk<strong>en</strong> er<br />
0 og det kan være elem<strong>en</strong>ter der vi med<br />
stor sikkerhet kj<strong>en</strong>ner d<strong>en</strong> framtidige<br />
utvikling<strong>en</strong> av trafikk<strong>en</strong>. Disse elem<strong>en</strong>t<strong>en</strong>e<br />
bør da utelates fra selve justeringsprosess<strong>en</strong>.<br />
Det kan vises matematisk at<br />
d<strong>en</strong> optimering<strong>en</strong> som er beskrevet også<br />
kan gjøres på trafikkmatriser der <strong>en</strong>keltelem<strong>en</strong>ter<br />
ikke skal tas med eller på<br />
trafikkmatriser der deler av matris<strong>en</strong> er<br />
borte.<br />
Med andre ord: vi kan kjøre d<strong>en</strong> samme<br />
justering<strong>en</strong> på <strong>en</strong> redusert matrise. Det er<br />
derfor laget <strong>en</strong> programpakke kalt<br />
REDUSER som angir hvilke data som<br />
skal brukes i <strong>en</strong> redusert trafikkmatrise.<br />
Programpakk<strong>en</strong> summerer også rad- og<br />
kolonnesumm<strong>en</strong>e.<br />
14.5 Prognosesystem for<br />
prognostisering av<br />
trafikkmatriser<br />
For prognostisering av trafikkmatriser er<br />
det utviklet et sett med programpakker<br />
som kan brukes. Figur 14.2 gir <strong>en</strong> <strong>oversikt</strong><br />
over prosess<strong>en</strong> og hvorledes de ulike<br />
programpakker brukes til prognostisering<strong>en</strong>.<br />
Dette gjøres ved følg<strong>en</strong>de trinn:<br />
1) Først samles trafikkmåling<strong>en</strong>e inn og<br />
lagres i <strong>en</strong> database (Trafikkmålinger).<br />
2) Deretter behandles trafikkmåling<strong>en</strong>e,<br />
om nødv<strong>en</strong>dig. Dette gjøres hvis trafikkmatris<strong>en</strong><br />
skal reduseres til <strong>en</strong><br />
mindre matrise<br />
eller hvis<br />
S<strong>en</strong>-<br />
radsummer og tral<br />
kolonnesummer nr<br />
ikke tidligere er<br />
beregnet. Dette 1<br />
gjøres ved bruk 2<br />
av program-<br />
3<br />
pakk<strong>en</strong> Reduser.<br />
3) Etter d<strong>en</strong>ne<br />
operasjon<strong>en</strong><br />
framkommer<br />
Reduserte tra- i<br />
fikkmatriser.<br />
4) Ut fra et sett med<br />
trafikkmålinger<br />
skal det nå lages<br />
prognoser for de n<br />
<strong>en</strong>kelte elem<strong>en</strong>ter<br />
i trafikkmatris<strong>en</strong>.<br />
Dette kan gjøres<br />
automatisk (Automatiske<br />
prognosemodeller)<br />
ved bruk av dynamisk<br />
lineære modeller og Kalmanfilter. En<br />
må være klar over at det her er tale<br />
om et stort antall trafikkelem<strong>en</strong>ter. I<br />
fjernnettet er det nå omlag 15 fjerns<strong>en</strong>traler,<br />
slik at det her må lages<br />
rundt 200 <strong>en</strong>keltprognoser. Programpakk<strong>en</strong><br />
med Kalmanfilter er utviklet<br />
slik at prognosemodell<strong>en</strong>e er robuste<br />
overfor <strong>en</strong>dringer i tidsrekk<strong>en</strong>. Som<br />
nevnt i kapittel 12 er det lagt inn<br />
automatisk outlier-deteksjon, hvilket<br />
justerer unormale observasjoner. I tillegg<br />
er det lagt inn prosedyrer for<br />
deteksjon av tr<strong>en</strong>dskift og nivåhopp i<br />
tidsrekk<strong>en</strong>e og <strong>en</strong>delig prosedyre for<br />
håndtering av mangl<strong>en</strong>de observasjoner.<br />
Dermed vil disse prognosemodell<strong>en</strong>e<br />
kunne brukes automatisk.<br />
5) I spesielle tilfeller kan det være aktuelt<br />
å b<strong>en</strong>ytte andre prognosemodeller<br />
på elem<strong>en</strong>ter i trafikkmatris<strong>en</strong>. Dette<br />
kan ev<strong>en</strong>tuelt gjøres også ved bruk av<br />
andre tilgj<strong>en</strong>gelige programpakker.<br />
For prognoser av rad- og<br />
kolonnesummer og for totalsumm<strong>en</strong><br />
vil dette være relevant. På aggregert<br />
nivå vil det være aktuelt å bruke mer<br />
kompliserte prognosemodeller<br />
(Manuelle prognosemodeller).<br />
6) Etter at prognostisering<strong>en</strong> er sluttført,<br />
legges prognos<strong>en</strong>e for de <strong>en</strong>kelte elem<strong>en</strong>ter,<br />
for rad- og kolonnesummer<br />
og for totalsumm<strong>en</strong> ut på separate<br />
filer (Prognoser for matriser;<br />
rad/kol:sum og totalsum). Disse<br />
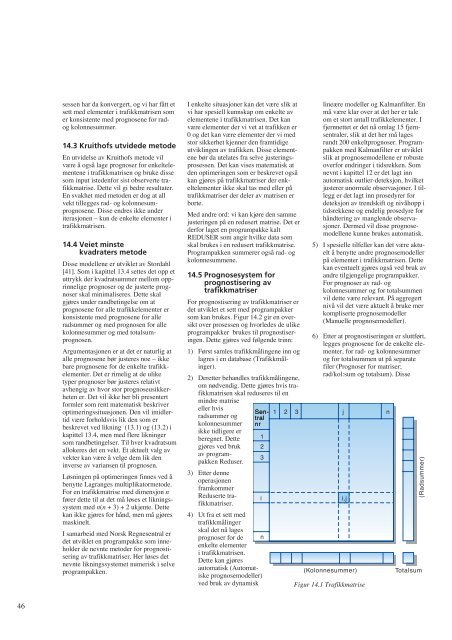
1 2 3 j n<br />
i,j<br />
(Kolonnesummer)<br />
Figur 14.1 Trafikkmatrise<br />
(Radsummer)<br />
Totalsum