Prognosemetoder – en oversikt - Telenor
Prognosemetoder – en oversikt - Telenor
Prognosemetoder – en oversikt - Telenor

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
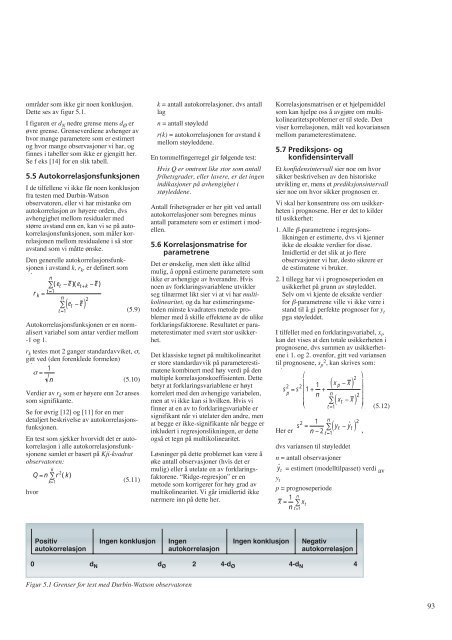
områder som ikke gir no<strong>en</strong> konklusjon.<br />
Dette ses av figur 5.1.<br />
I figur<strong>en</strong> er dN nedre gr<strong>en</strong>se m<strong>en</strong>s dØ er<br />
øvre gr<strong>en</strong>se. Gr<strong>en</strong>severdi<strong>en</strong>e avh<strong>en</strong>ger av<br />
hvor mange parametere som er estimert<br />
og hvor mange observasjoner vi har, og<br />
finnes i tabeller som ikke er gj<strong>en</strong>gitt her.<br />
Se f eks [14] for <strong>en</strong> slik tabell.<br />
5.5 Autokorrelasjonsfunksjon<strong>en</strong><br />
I de tilfell<strong>en</strong>e vi ikke får no<strong>en</strong> konklusjon<br />
fra test<strong>en</strong> med Durbin-Watson<br />
observator<strong>en</strong>, eller vi har mistanke om<br />
autokorrelasjon av høyere ord<strong>en</strong>, dvs<br />
avh<strong>en</strong>gighet mellom residualer med<br />
større avstand <strong>en</strong>n <strong>en</strong>, kan vi se på autokorrelasjonsfunksjon<strong>en</strong>,<br />
som måler korrelasjon<strong>en</strong><br />
mellom residual<strong>en</strong>e i så stor<br />
avstand som vi måtte ønske.<br />
D<strong>en</strong> g<strong>en</strong>erelle autokorrelasjonsfunksjon<strong>en</strong><br />
i avstand k, rk , er definert som<br />
n<br />
∑(et<br />
− e )(et+k − e )<br />
t=1 r k =<br />
( et − e ) 2<br />
n<br />
∑<br />
t=1<br />
(5.9)<br />
Autokorrelasjonsfunksjon<strong>en</strong> er <strong>en</strong> normalisert<br />
variabel som antar verdier mellom<br />
-1 og 1.<br />
rk testes mot 2 ganger standardavviket, σ,<br />
gitt ved (d<strong>en</strong> for<strong>en</strong>klede formel<strong>en</strong>)<br />
σ =<br />
(5.10)<br />
1<br />
n<br />
Verdier av rk som er høyere <strong>en</strong>n 2σ anses<br />
som signifikante.<br />
Se for øvrig [12] og [11] for <strong>en</strong> mer<br />
detaljert beskrivelse av autokorrelasjonsfunksjon<strong>en</strong>.<br />
En test som sjekker hvorvidt det er autokorrelasjon<br />
i alle autokorrelasjonsfunksjon<strong>en</strong>e<br />
samlet er basert på Kji-kvadrat<br />
observator<strong>en</strong>:<br />
k<br />
Q = n r2<br />
k=1<br />
hvor<br />
∑ (k)<br />
(5.11)<br />
k = antall autokorrelasjoner, dvs antall<br />
lag<br />
n = antall støyledd<br />
r(k) = autokorrelasjon<strong>en</strong> for avstand k<br />
mellom støyledd<strong>en</strong>e.<br />
En tommelfingerregel gir følg<strong>en</strong>de test:<br />
Hvis Q er omtr<strong>en</strong>t like stor som antall<br />
frihetsgrader, eller lavere, er det ing<strong>en</strong><br />
indikasjoner på avh<strong>en</strong>gighet i<br />
støyledd<strong>en</strong>e.<br />
Antall frihetsgrader er her gitt ved antall<br />
autokorrelasjoner som beregnes minus<br />
antall parametere som er estimert i modell<strong>en</strong>.<br />
5.6 Korrelasjonsmatrise for<br />
parametr<strong>en</strong>e<br />
Det er ønskelig, m<strong>en</strong> slett ikke alltid<br />
mulig, å oppnå estimerte parametere som<br />
ikke er avh<strong>en</strong>gige av hverandre. Hvis<br />
no<strong>en</strong> av forklaringsvariabl<strong>en</strong>e utvikler<br />
seg tilnærmet likt sier vi at vi har multikolinearitet,<br />
og da har estimeringsmetod<strong>en</strong><br />
minste kvadraters metode problemer<br />
med å skille effekt<strong>en</strong>e av de ulike<br />
forklaringsfaktor<strong>en</strong>e. Resultatet er parameterestimater<br />
med svært stor usikkerhet.<br />
Det klassiske tegnet på multikolinearitet<br />
er store standardavvik på parameterestimat<strong>en</strong>e<br />
kombinert med høy verdi på d<strong>en</strong><br />
multiple korrelasjonskoeffisi<strong>en</strong>t<strong>en</strong>. Dette<br />
betyr at forklaringsvariabl<strong>en</strong>e er høyt<br />
korrelert med d<strong>en</strong> avh<strong>en</strong>gige variabel<strong>en</strong>,<br />
m<strong>en</strong> at vi ikke kan si hvilk<strong>en</strong>. Hvis vi<br />
finner at <strong>en</strong> av to forklaringsvariable er<br />
signifikant når vi utelater d<strong>en</strong> andre, m<strong>en</strong><br />
at begge er ikke-signifikante når begge er<br />
inkludert i regresjonslikning<strong>en</strong>, er dette<br />
også et tegn på multikolinearitet.<br />
Løsninger på dette problemet kan være å<br />
øke antall observasjoner (hvis det er<br />
mulig) eller å utelate <strong>en</strong> av forklaringsfaktor<strong>en</strong>e.<br />
“Ridge-regresjon” er <strong>en</strong><br />
metode som korrigerer for høy grad av<br />
multikolinearitet. Vi går imidlertid ikke<br />
nærmere inn på dette her.<br />
Korrelasjonsmatris<strong>en</strong> er et hjelpemiddel<br />
som kan hjelpe oss å avgjøre om multikolinearitetsproblemer<br />
er til stede. D<strong>en</strong><br />
viser korrelasjon<strong>en</strong>, målt ved kovarians<strong>en</strong><br />
mellom parameterestimat<strong>en</strong>e.<br />
5.7 Prediksjons- og<br />
konfid<strong>en</strong>sintervall<br />
Et konfid<strong>en</strong>sintervall sier noe om hvor<br />
sikker beskrivels<strong>en</strong> av d<strong>en</strong> historiske<br />
utvikling er, m<strong>en</strong>s et prediksjonsintervall<br />
sier noe om hvor sikker prognos<strong>en</strong> er.<br />
Vi skal her kons<strong>en</strong>trere oss om usikkerhet<strong>en</strong><br />
i prognos<strong>en</strong>e. Her er det to kilder<br />
til usikkerhet:<br />
1. Alle β-parametr<strong>en</strong>e i regresjonslikning<strong>en</strong><br />
er estimerte, dvs vi kj<strong>en</strong>ner<br />
ikke de eksakte verdier for disse.<br />
Imidlertid er det slik at jo flere<br />
observasjoner vi har, desto sikrere er<br />
de estimat<strong>en</strong>e vi bruker.<br />
2. I tillegg har vi i prognoseperiod<strong>en</strong> <strong>en</strong><br />
usikkerhet på grunn av støyleddet.<br />
Selv om vi kj<strong>en</strong>te de eksakte verdier<br />
for β-parametr<strong>en</strong>e ville vi ikke være i<br />
stand til å gi perfekte prognoser for yt pga støyleddet.<br />
I tilfellet med <strong>en</strong> forklaringsvariabel, x t ,<br />
kan det vises at d<strong>en</strong> totale usikkerhet<strong>en</strong> i<br />
prognos<strong>en</strong>e, dvs summ<strong>en</strong> av usikkerhet<strong>en</strong>e<br />
i 1. og 2. ov<strong>en</strong>for, gitt ved varians<strong>en</strong><br />
til prognos<strong>en</strong>e, s p 2 , kan skrives som:<br />
2 2 1<br />
s = s 1 +<br />
p n +<br />
( x p − x ) 2<br />
( xt − x ) 2<br />
⎛<br />
⎞<br />
⎜<br />
⎟<br />
⎜<br />
⎟<br />
⎜ n ⎟<br />
⎜ ∑ ⎟<br />
⎝ t=1 ⎠<br />
s<br />
Her er ,<br />
2 = 1 n 2<br />
∑(<br />
yt − ˆy t ) n − 2 t=1<br />
(5.12)<br />
dvs varians<strong>en</strong> til støyleddet<br />
n = antall observasjoner<br />
= estimert (modelltilpasset) verdi av<br />
yt p = prognoseperiode<br />
1 n<br />
x = ∑ xt n<br />
ˆy t<br />
Positiv Ing<strong>en</strong> konklusjon Ing<strong>en</strong> Ing<strong>en</strong> konklusjon Negativ<br />
autokorrelasjon autokorrelasjon autokorrelasjon<br />
0 d N d Ø 2 4-d Ø 4-d N 4<br />
Figur 5.1 Gr<strong>en</strong>ser for test med Durbin-Watson observator<strong>en</strong><br />
t=1<br />
93