

SE-Power Can Open Handbuch - Afag Handhabungs- und ...
SE-Power Can Open Handbuch - Afag Handhabungs- und ...
SE-Power Can Open Handbuch - Afag Handhabungs- und ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Interpolated Position Mode<br />
Übersicht<br />
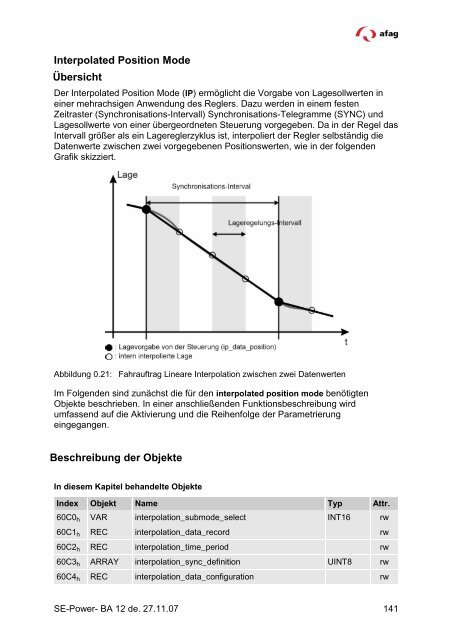
Der Interpolated Position Mode (IP) ermöglicht die Vorgabe von Lagesollwerten in<br />
einer mehrachsigen Anwendung des Reglers. Dazu werden in einem festen<br />
Zeitraster (Synchronisations-Intervall) Synchronisations-Telegramme (SYNC) <strong>und</strong><br />
Lagesollwerte von einer übergeordneten Steuerung vorgegeben. Da in der Regel das<br />
Intervall größer als ein Lagereglerzyklus ist, interpoliert der Regler selbständig die<br />
Datenwerte zwischen zwei vorgegebenen Positionswerten, wie in der folgenden<br />
Grafik skizziert.<br />
Abbildung 0.21: Fahrauftrag Lineare Interpolation zwischen zwei Datenwerten<br />
Im Folgenden sind zunächst die für den interpolated position mode benötigten<br />
Objekte beschrieben. In einer anschließenden Funktionsbeschreibung wird<br />
umfassend auf die Aktivierung <strong>und</strong> die Reihenfolge der Parametrierung<br />
eingegangen.<br />
Beschreibung der Objekte<br />
In diesem Kapitel behandelte Objekte<br />
Index Objekt Name Typ Attr.<br />
60C0 h VAR interpolation_submode_select INT16 rw<br />
60C1 h REC interpolation_data_record rw<br />
60C2 h REC interpolation_time_period rw<br />
60C3 h ARRAY interpolation_sync_definition UINT8 rw<br />
60C4 h REC interpolation_data_configuration rw<br />
<strong>SE</strong>-<strong>Power</strong>- BA 12 de. 27.11.07 141













