

SE-Power Can Open Handbuch - Afag Handhabungs- und ...
SE-Power Can Open Handbuch - Afag Handhabungs- und ...
SE-Power Can Open Handbuch - Afag Handhabungs- und ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Funktionsbeschreibung<br />
Vorbereitende Parametrierung<br />
Bevor der Regler in die Betriebsart interpolated position mode geschaltet werden kann,<br />
müssen diverse Einstellungen vorgenommen werden: Dazu zählen die Einstellung<br />
des Interpolations-Intervalls (interpolation_time_period), also der Zeit zwischen zwei<br />
SYNC-Telegrammen, der Interpolationstyp (interpolation_submode_select) <strong>und</strong> die<br />
Art der Synchronisation (interpolation_sync_definition). Zusätzlich muss der Zugriff<br />
auf den Positionspuffer über das Objekt buffer_clear freigegeben werden.<br />
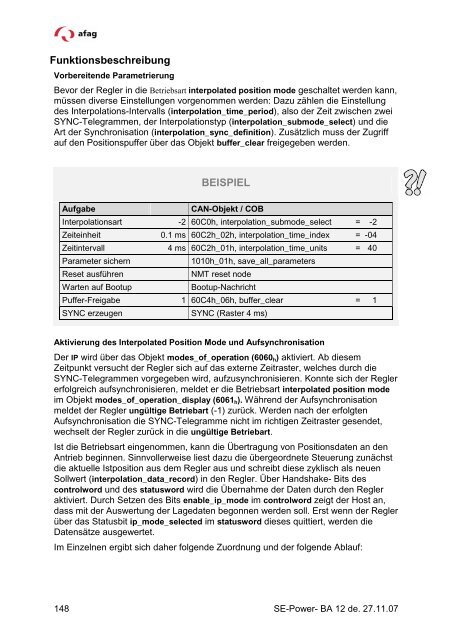
Aufgabe<br />
Interpolationsart -2<br />
BEISPIEL<br />
CAN-Objekt / COB<br />
60C0h, interpolation_submode_select = -2<br />
Zeiteinheit 0.1 ms 60C2h_02h, interpolation_time_index = -04<br />
Zeitintervall 4 ms 60C2h_01h, interpolation_time_units = 40<br />
Parameter sichern<br />
Reset ausführen<br />
Warten auf Bootup<br />
Puffer-Freigabe 1<br />
SYNC erzeugen<br />
1010h_01h, save_all_parameters<br />
NMT reset node<br />
Bootup-Nachricht<br />
60C4h_06h, buffer_clear = 1<br />
SYNC (Raster 4 ms)<br />
Aktivierung des Interpolated Position Mode <strong>und</strong> Aufsynchronisation<br />
Der IP wird über das Objekt modes_of_operation (6060h) aktiviert. Ab diesem<br />
Zeitpunkt versucht der Regler sich auf das externe Zeitraster, welches durch die<br />
SYNC-Telegrammen vorgegeben wird, aufzusynchronisieren. Konnte sich der Regler<br />
erfolgreich aufsynchronisieren, meldet er die Betriebsart interpolated position mode<br />
im Objekt modes_of_operation_display (6061h). Während der Aufsynchronisation<br />
meldet der Regler ungültige Betriebart (-1) zurück. Werden nach der erfolgten<br />
Aufsynchronisation die SYNC-Telegramme nicht im richtigen Zeitraster gesendet,<br />
wechselt der Regler zurück in die ungültige Betriebart.<br />
Ist die Betriebsart eingenommen, kann die Übertragung von Positionsdaten an den<br />
Antrieb beginnen. Sinnvollerweise liest dazu die übergeordnete Steuerung zunächst<br />
die aktuelle Istposition aus dem Regler aus <strong>und</strong> schreibt diese zyklisch als neuen<br />
Sollwert (interpolation_data_record) in den Regler. Über Handshake- Bits des<br />
controlword <strong>und</strong> des statusword wird die Übernahme der Daten durch den Regler<br />
aktiviert. Durch Setzen des Bits enable_ip_mode im controlword zeigt der Host an,<br />
dass mit der Auswertung der Lagedaten begonnen werden soll. Erst wenn der Regler<br />
über das Statusbit ip_mode_selected im statusword dieses quittiert, werden die<br />
Datensätze ausgewertet.<br />
Im Einzelnen ergibt sich daher folgende Zuordnung <strong>und</strong> der folgende Ablauf:<br />
148 <strong>SE</strong>-<strong>Power</strong>- BA 12 de. 27.11.07













