

Projekt Micarpet Projektbericht - artecLab - Universität Bremen
Projekt Micarpet Projektbericht - artecLab - Universität Bremen
Projekt Micarpet Projektbericht - artecLab - Universität Bremen

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>Projekt</strong> MiCarpet <strong>Projekt</strong>bericht<br />
Software<br />
Hardware<br />
Lautsprecher<br />
Engine<br />
Sound Input<br />
Aktorik Grafik<br />
Aktoren<br />
Physik<br />
CAVE Sensoren<br />
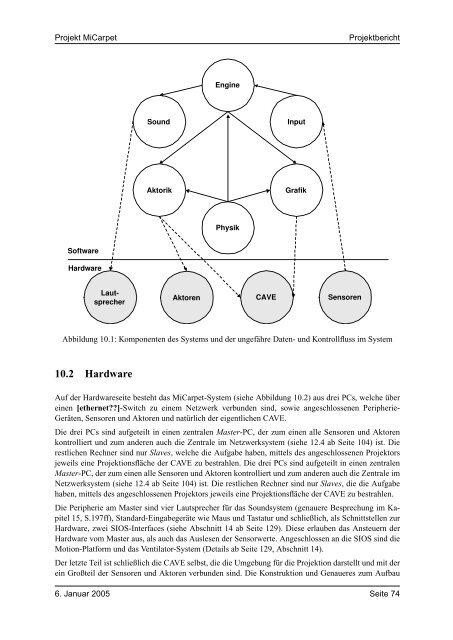
Abbildung 10.1: Komponenten des Systems und der ungefähre Daten- und Kontrollfluss im System<br />
10.2 Hardware<br />
Auf der Hardwareseite besteht das MiCarpet-System (siehe Abbildung 10.2) aus drei PCs, welche über<br />
einen [ethernet??]-Switch zu einem Netzwerk verbunden sind, sowie angeschlossenen Peripherie-<br />
Geräten, Sensoren und Aktoren und natürlich der eigentlichen CAVE.<br />
Die drei PCs sind aufgeteilt in einen zentralen Master-PC, der zum einen alle Sensoren und Aktoren<br />
kontrolliert und zum anderen auch die Zentrale im Netzwerksystem (siehe 12.4 ab Seite 104) ist. Die<br />
restlichen Rechner sind nur Slaves, welche die Aufgabe haben, mittels des angeschlossenen <strong>Projekt</strong>ors<br />
jeweils eine <strong>Projekt</strong>ionsfläche der CAVE zu bestrahlen. Die drei PCs sind aufgeteilt in einen zentralen<br />
Master-PC, der zum einen alle Sensoren und Aktoren kontrolliert und zum anderen auch die Zentrale im<br />
Netzwerksystem (siehe 12.4 ab Seite 104) ist. Die restlichen Rechner sind nur Slaves, die die Aufgabe<br />
haben, mittels des angeschlossenen <strong>Projekt</strong>ors jeweils eine <strong>Projekt</strong>ionsfläche der CAVE zu bestrahlen.<br />
Die Peripherie am Master sind vier Lautsprecher für das Soundsystem (genauere Besprechung im Kapitel<br />
15, S.197ff), Standard-Eingabegeräte wie Maus und Tastatur und schließlich, als Schnittstellen zur<br />
Hardware, zwei SIOS-Interfaces (siehe Abschnitt 14 ab Seite 129). Diese erlauben das Ansteuern der<br />
Hardware vom Master aus, als auch das Auslesen der Sensorwerte. Angeschlossen an die SIOS sind die<br />
Motion-Platform und das Ventilator-System (Details ab Seite 129, Abschnitt 14).<br />
Der letzte Teil ist schließlich die CAVE selbst, die die Umgebung für die <strong>Projekt</strong>ion darstellt und mit der<br />
ein Großteil der Sensoren und Aktoren verbunden sind. Die Konstruktion und Genaueres zum Aufbau<br />
6. Januar 2005 Seite 74













