

artecLab - Universität Bremen
artecLab - Universität Bremen
artecLab - Universität Bremen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
3. Sensorik und Aktorik 65<br />
Es wurde ein Programm entwickelt, das korrekt<br />
angeschlossene Joysticks bzw. Potentiometer und<br />
Feuerknöpfe auslesen konnte. Für „Joy-O-Mat-X“<br />
stellte sich der A.R.M. als Joystick mit Ruderund<br />
Schubfunktion dar, damit alle Informationen,<br />
die über den A.R.M. ermittelt werden, kompakt<br />
ausgegeben werden können.<br />
„Joy-O-Mat-X“ liefert hierbei Informationen über<br />
den Status der vier Achsen und der ersten vier<br />
Knöpfe eines jeden erkannten Joysticks (bis zu<br />
16 können vom Betriebssystem erkannt werden).<br />
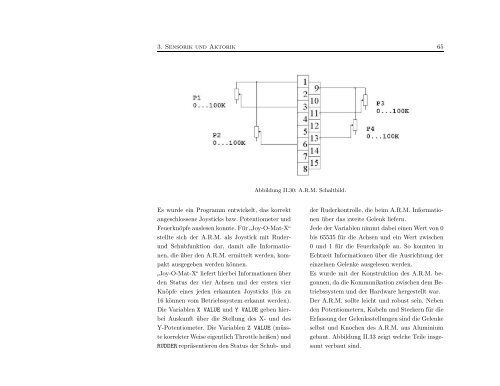
Die Variablen X VALUE und Y VALUE geben hierbei<br />
Auskunft über die Stellung des X- und des<br />
Y-Potentiometer. Die Variablen Z VALUE (müsste<br />
korrekter Weise eigentlich Throttle heißen) und<br />
RUDDER repräsentieren den Status der Schub- und<br />
Abbildung II.30: A.R.M. Schaltbild.<br />
der Ruderkontrolle, die beim A.R.M. Informationen<br />
über das zweite Gelenk liefern.<br />
Jede der Variablen nimmt dabei einen Wert von 0<br />
bis 65535 für die Achsen und ein Wert zwischen<br />
0 und 1 für die Feuerknöpfe an. So konnten in<br />
Echtzeit Informationen über die Ausrichtung der<br />
einzelnen Gelenke ausgelesen werden.<br />
Es wurde mit der Konstruktion des A.R.M. begonnen,<br />
da die Kommunikation zwischen dem Betriebssystem<br />
und der Hardware hergestellt war.<br />
Der A.R.M. sollte leicht und robust sein. Neben<br />
den Potentiometern, Kabeln und Steckern für die<br />
Erfassung der Gelenksstellungen sind die Gelenke<br />
selbst und Knochen des A.R.M. aus Aluminium<br />
gebaut. Abbildung II.33 zeigt welche Teile insgesamt<br />
verbaut sind.













