

TH`ESE DE DOCTORAT DE L'UNIVERSITà PARIS 6 Spécialité ...
TH`ESE DE DOCTORAT DE L'UNIVERSITà PARIS 6 Spécialité ...
TH`ESE DE DOCTORAT DE L'UNIVERSITà PARIS 6 Spécialité ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
7.3 Algorithme MVDR à coefficients variables dans le temps 113<br />
L<br />
l = 1899 M = 1 M = 100<br />
K = 2 L<br />
K = 200<br />
ρ −3.65 −6.54 0 −5.71 −4.02 −3.65<br />
Tab. 7.3: Influence des paramètres sur le rapport SINR normalisé<br />
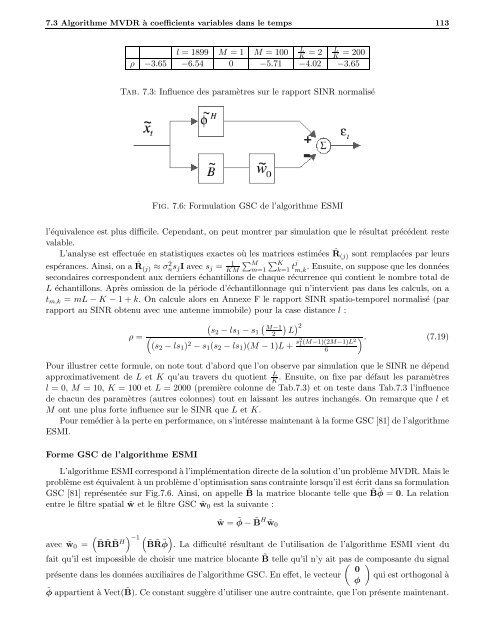
Fig. 7.6: Formulation GSC de l’algorithme ESMI<br />
l’équivalence est plus difficile. Cependant, on peut montrer par simulation que le résultat précédent reste<br />
valable.<br />
L’analyse est effectuée en statistiques exactes où les matrices estimées ˆR (j) sont remplacées par leurs<br />
espérances. Ainsi, on a ˆR (j) ≈ σn 2s jI avec s j = 1 ∑ M ∑ K<br />
KM m=1 k=1 tj m,k<br />
. Ensuite, on suppose que les données<br />
secondaires correspondent aux derniers échantillons de chaque récurrence qui contient le nombre total de<br />
L échantillons. Après omission de la période d’échantillonnage qui n’intervient pas dans les calculs, on a<br />
t m,k = mL − K − 1 + k. On calcule alors en Annexe F le rapport SINR spatio-temporel normalisé (par<br />
rapport au SINR obtenu avec une antenne immobile) pour la case distance l :<br />
ρ =<br />
( (<br />
s2 − ls 1 − s M−1<br />
) ) 2<br />
1 L<br />
2<br />
((s 2 − ls 1 ) 2 − s 1 (s 2 − ls 1 )(M − 1)L + s2 1 (M−1)(2M−1)L2<br />
6<br />
). (7.19)<br />
Pour illustrer cette formule, on note tout d’abord que l’on observe par simulation que le SINR ne dépend<br />
approximativement de L et K qu’au travers du quotient L K<br />
. Ensuite, on fixe par défaut les paramètres<br />
l = 0, M = 10, K = 100 et L = 2000 (première colonne de Tab.7.3) et on teste dans Tab.7.3 l’influence<br />
de chacun des paramètres (autres colonnes) tout en laissant les autres inchangés. On remarque que l et<br />
M ont une plus forte influence sur le SINR que L et K.<br />
Pour remédier à la perte en performance, on s’intéresse maintenant à la forme GSC [81] de l’algorithme<br />
ESMI.<br />
Forme GSC de l’algorithme ESMI<br />
L’algorithme ESMI correspond à l’implémentation directe de la solution d’un problème MVDR. Mais le<br />
problème est équivalent à un problème d’optimisation sans contrainte lorsqu’il est écrit dans sa formulation<br />
GSC [81] représentée sur Fig.7.6. Ainsi, on appelle ˜B la matrice blocante telle que ˜B˜φ = 0. La relation<br />
entre le filtre spatial ˜w et le filtre GSC ˜w 0 est la suivante :<br />
˜w = ˜φ − ˜B H ˜w 0<br />
) −1<br />
avec ˜w 0 =<br />
(˜B ˜R˜BH<br />
(˜B ˜R˜φ)<br />
. La difficulté résultant de l’utilisation de l’algorithme ESMI vient du<br />
fait qu’il est impossible de choisir une matrice blocante ˜B telle qu’il n’y ait pas ( de)<br />
composante du signal<br />
0<br />
présente dans les données auxiliaires de l’algorithme GSC. En effet, le vecteur qui est orthogonal à<br />
φ<br />
˜φ appartient à Vect(˜B). Ce constant suggère d’utiliser une autre contrainte, que l’on présente maintenant.













