

TH`ESE DE DOCTORAT DE L'UNIVERSITà PARIS 6 Spécialité ...
TH`ESE DE DOCTORAT DE L'UNIVERSITà PARIS 6 Spécialité ...
TH`ESE DE DOCTORAT DE L'UNIVERSITà PARIS 6 Spécialité ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
2.5 Implémentation de la formation de faisceaux 33<br />
0<br />
Diagramme de reception, focalisation = 0 0 0<br />
−5<br />
−10<br />
−15<br />
−20<br />
dB<br />
−25<br />
−30<br />
−35<br />
−40<br />
−45<br />
−50<br />
−100 −80 −60 −40 −20 0 20 40 60 80 100<br />
azimut en degres<br />
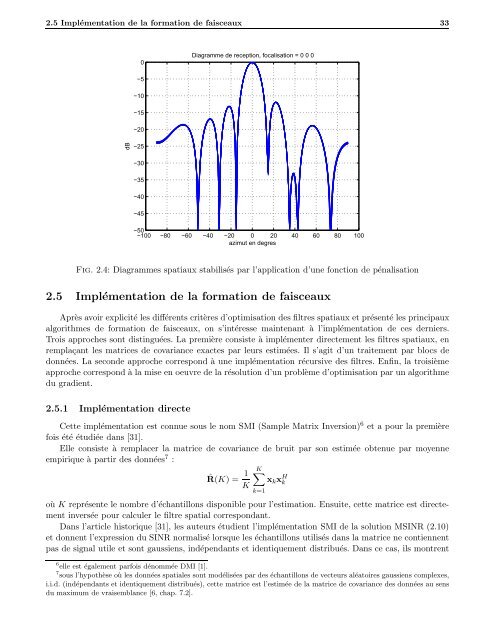
Fig. 2.4: Diagrammes spatiaux stabilisés par l’application d’une fonction de pénalisation<br />
2.5 Implémentation de la formation de faisceaux<br />
Après avoir explicité les différents critères d’optimisation des filtres spatiaux et présenté les principaux<br />
algorithmes de formation de faisceaux, on s’intéresse maintenant à l’implémentation de ces derniers.<br />
Trois approches sont distinguées. La première consiste à implémenter directement les filtres spatiaux, en<br />
remplaçant les matrices de covariance exactes par leurs estimées. Il s’agit d’un traitement par blocs de<br />
données. La seconde approche correspond à une implémentation récursive des filtres. Enfin, la troisième<br />
approche correspond à la mise en oeuvre de la résolution d’un problème d’optimisation par un algorithme<br />
du gradient.<br />
2.5.1 Implémentation directe<br />
Cette implémentation est connue sous le nom SMI (Sample Matrix Inversion) 6 et a pour la première<br />
fois été étudiée dans [31].<br />
Elle consiste à remplacer la matrice de covariance de bruit par son estimée obtenue par moyenne<br />
empirique à partir des données 7 :<br />
ˆR(K) = 1 K∑<br />
x k x H k<br />
K<br />
où K représente le nombre d’échantillons disponible pour l’estimation. Ensuite, cette matrice est directement<br />
inversée pour calculer le filtre spatial correspondant.<br />
Dans l’article historique [31], les auteurs étudient l’implémentation SMI de la solution MSINR (2.10)<br />
et donnent l’expression du SINR normalisé lorsque les échantillons utilisés dans la matrice ne contiennent<br />
pas de signal utile et sont gaussiens, indépendants et identiquement distribués. Dans ce cas, ils montrent<br />
6 elle est également parfois dénommée DMI [1].<br />
7 sous l’hypothèse où les données spatiales sont modélisées par des échantillons de vecteurs aléatoires gaussiens complexes,<br />
i.i.d. (indépendants et identiquement distribués), cette matrice est l’estimée de la matrice de covariance des données au sens<br />
du maximum de vraisemblance [6, chap. 7.2].<br />
k=1













