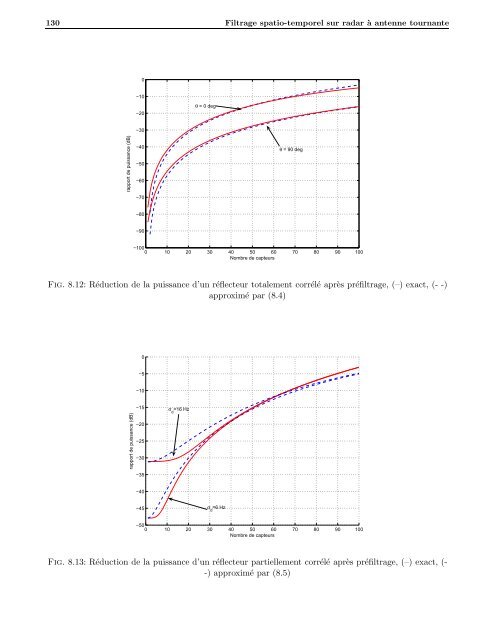
130 Filtrage spatio-temporel sur radar à antenne tournante 0 −10 −20 θ = 0 deg rapport de puissance (dB) −30 −40 −50 −60 −70 θ = 90 deg −80 −90 −100 0 10 20 30 40 50 60 70 80 90 100 Nombre de capteurs Fig. 8.12: Réduction de la puissance d’un réflecteur totalement corrélé après préfiltrage, (–) exact, (- -) approximé par (8.4) 0 −5 −10 rapport de puissance (dB) −15 −20 −25 −30 −35 σ d =16 Hz −40 −45 σ d =6 Hz −50 0 10 20 30 40 50 60 70 80 90 100 Nombre de capteurs Fig. 8.13: Réduction de la puissance d’un réflecteur partiellement corrélé après préfiltrage, (–) exact, (- -) approximé par (8.5)
8.4 Traitement proposé en l’absence de référence brouillage seul 131 de mouvement interne égale à 0.8 m/s en bande S. On observe que les pertes en performance restent une fonction croissante du nombre de capteurs. Ensuite, elles se dégradent par rapport à celles de Fig.8.12 pour un faible nombre de capteurs. Typiquement, lorsque σ d = 16 Hz, la décorrélation du fouillis conduit à une perte en performance d’environ 4 dB, avec N = 30. Cependant, lorsque ce nombre augmente, les différences entre les courbes avec fouillis totalement corrélé et partiellement corrélé s’estompent. Par conséquent, l’efficacité du traitement en présence de fouillis partiellement corrélé est surtout réduite lorsque le nombre de capteurs est faible. Finalement, on vérifie que la courbe approchée par (8.5) coincide avec la courbe exacte, particulièrement pour des faibles valeurs de l’écart type du spectre gaussien du fouillis. 8.4.2 Filtrage STAP après formation de faisceaux et filtrage Doppler Comme nous l’avons vu dans la section précédente, les performances du filtrage ACF se dégradent lorsque la vitesse de rotation d’antenne augmente ou lorsque le fouillis devient décorrélé. Par conséquent, l’utilisation de ce préfiltrage suivie de l’implémentation du filtrage séparable SAPTAP ne fonctionne pas pour tous les scénarios. Ici, nous proposons un traitement spatio-temporel qui ne nécessite pas la présence de données de référence brouillage seul (ou données tertiaires). Ainsi, nous proposons un algorithme de filtrage STAP dans lequel le filtrage adaptatif s’effectue sur les données après formation de faisceaux et filtrage Doppler non-adaptatif. Pour le distinguer d’autres algorithmes de filtrage STAP, le traitement proposé est dénommé BDSTAP (Beamspace post-Doppler STAP, selon [79]). Pour l’étude de ce traitement, nous distinguerons deux situations, en fonction de la connaissance ou non des directions d’arrivée des brouilleurs. Ensuite, nous étudierons l’influence du nombre de filtres Doppler sur les performances et montrerons sur des simulations qu’un faible nombre de faisceaux et de filtres Doppler est suffisant pour atteindre de bonnes performances. Par conséquent, le traitement proposé présente le double avantage d’une convergence rapide du SINR avec le nombre d’échantillons disponibles à l’estimation et d’une faible complexité de calcul. Principe du filtrage Le traitement proposé est réalisé en trois étapes. Tout d’abord, des faisceaux sont formés sur les données primaires et secondaires. Ensuite, un filtrage Doppler est appliqué en sortie de chaque faisceau formé. Finalement, un filtre adaptatif spatio-temporel calculé à partir des données secondaires est appliqué sur les données primaires dans l’espace faisceaux-Doppler. L’ensemble du traitement BDSTAP est résumé en Fig.8.14. Lors de la première étape de formation de faisceaux, le premier faisceau (voie principale) est formé dans la direction de la cible. Les autres faisceaux (voies auxiliaires) sont formés dans d’autres directions. Notons que pour que l’antibrouillage soit efficace, le nombre de faisceaux formés doit être au moins supérieur à J + 1. Lorsqu’un a priori est disponible sur les DOAs des brouilleurs, les voies auxiliaires peuvent être formées dans ces directions. Dans le cas contraire, les faisceaux peuvent par exemple être formés de façon à couvrir un certain secteur angulaire, comme l’illustre Fig.8.15. Sur cette figure, une grappe de neuf faisceaux avec θ 3dB = 12 deg. couvrant un large secteur angulaire est représentée. Ensuite, afin d’éviter un décalage de la direction de focalisation des faisceaux de récurrence à récurrence, résultant de la rotation d’antenne, une compensation de rotation est implémentée. Finalement, pour l’implémentation de l’algorithme, il est utile de répondre aux trois questions suivantes : – Comment former les voies auxiliaires – Combien de filtres Doppler doivent être utilisés – Comment choisir les fréquences normalisées des filtres Doppler Des éléments de réponse à ces questions seront donnés dans le paragraphe suivant, après analyse de l’influence des différents paramètres de l’algorithme sur ses performances. Auparavant, nous détaillons l’expression du filtre BDSTAP W. Décomposant le filtrage en la série des trois étapes détaillée précédemment,