

TH`ESE DE DOCTORAT DE L'UNIVERSITà PARIS 6 Spécialité ...
TH`ESE DE DOCTORAT DE L'UNIVERSITà PARIS 6 Spécialité ...
TH`ESE DE DOCTORAT DE L'UNIVERSITà PARIS 6 Spécialité ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
126 Filtrage spatio-temporel sur radar à antenne tournante<br />
0<br />
−5<br />
−10<br />
−15<br />
dB<br />
−20<br />
−25<br />
−30<br />
−35<br />
STAP − EVP<br />
SAPTAP − LSMI (δ = 10)<br />
SAPTAP − LSMI (δ = 50)<br />
SAPTAP − Penalty F.<br />
−40<br />
0 20 40 60 80 100 120<br />
Nombre d’echantillons<br />
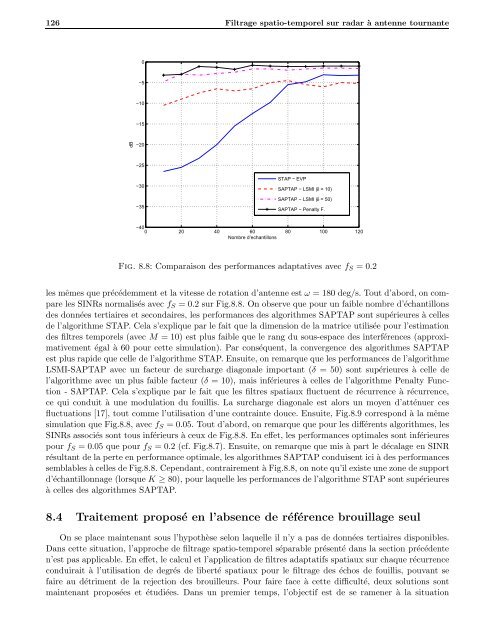
Fig. 8.8: Comparaison des performances adaptatives avec f S = 0.2<br />
les mêmes que précédemment et la vitesse de rotation d’antenne est ω = 180 deg/s. Tout d’abord, on compare<br />
les SINRs normalisés avec f S = 0.2 sur Fig.8.8. On observe que pour un faible nombre d’échantillons<br />
des données tertiaires et secondaires, les performances des algorithmes SAPTAP sont supérieures à celles<br />
de l’algorithme STAP. Cela s’explique par le fait que la dimension de la matrice utilisée pour l’estimation<br />
des filtres temporels (avec M = 10) est plus faible que le rang du sous-espace des interférences (approximativement<br />
égal à 60 pour cette simulation). Par conséquent, la convergence des algorithmes SAPTAP<br />
est plus rapide que celle de l’algorithme STAP. Ensuite, on remarque que les performances de l’algorithme<br />
LSMI-SAPTAP avec un facteur de surcharge diagonale important (δ = 50) sont supérieures à celle de<br />
l’algorithme avec un plus faible facteur (δ = 10), mais inférieures à celles de l’algorithme Penalty Function<br />
- SAPTAP. Cela s’explique par le fait que les filtres spatiaux fluctuent de récurrence à récurrence,<br />
ce qui conduit à une modulation du fouillis. La surcharge diagonale est alors un moyen d’atténuer ces<br />
fluctuations [17], tout comme l’utilisation d’une contrainte douce. Ensuite, Fig.8.9 correspond à la même<br />
simulation que Fig.8.8, avec f S = 0.05. Tout d’abord, on remarque que pour les différents algorithmes, les<br />
SINRs associés sont tous inférieurs à ceux de Fig.8.8. En effet, les performances optimales sont inférieures<br />
pour f S = 0.05 que pour f S = 0.2 (cf. Fig.8.7). Ensuite, on remarque que mis à part le décalage en SINR<br />
résultant de la perte en performance optimale, les algorithmes SAPTAP conduisent ici à des performances<br />
semblables à celles de Fig.8.8. Cependant, contrairement à Fig.8.8, on note qu’il existe une zone de support<br />
d’échantillonnage (lorsque K ≥ 80), pour laquelle les performances de l’algorithme STAP sont supérieures<br />
à celles des algorithmes SAPTAP.<br />
8.4 Traitement proposé en l’absence de référence brouillage seul<br />
On se place maintenant sous l’hypothèse selon laquelle il n’y a pas de données tertiaires disponibles.<br />
Dans cette situation, l’approche de filtrage spatio-temporel séparable présenté dans la section précédente<br />
n’est pas applicable. En effet, le calcul et l’application de filtres adaptatifs spatiaux sur chaque récurrence<br />
conduirait à l’utilisation de degrés de liberté spatiaux pour le filtrage des échos de fouillis, pouvant se<br />
faire au détriment de la rejection des brouilleurs. Pour faire face à cette difficulté, deux solutions sont<br />
maintenant proposées et étudiées. Dans un premier temps, l’objectif est de se ramener à la situation













