

TH`ESE DE DOCTORAT DE L'UNIVERSITà PARIS 6 Spécialité ...
TH`ESE DE DOCTORAT DE L'UNIVERSITà PARIS 6 Spécialité ...
TH`ESE DE DOCTORAT DE L'UNIVERSITà PARIS 6 Spécialité ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
30 Introduction<br />
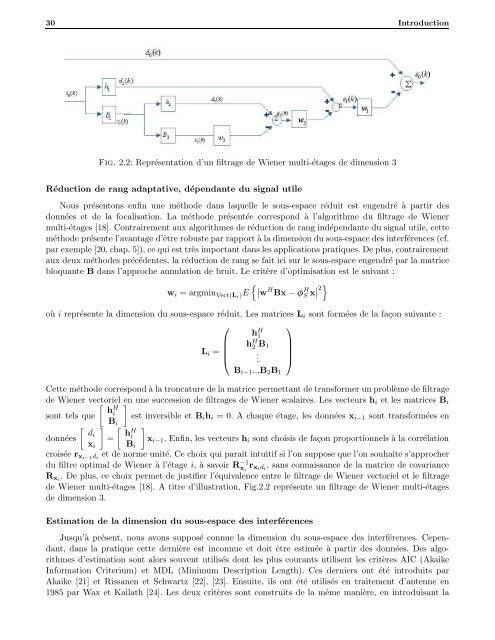
Fig. 2.2: Représentation d’un filtrage de Wiener multi-étages de dimension 3<br />
Réduction de rang adaptative, dépendante du signal utile<br />
Nous présentons enfin une méthode dans laquelle le sous-espace réduit est engendré à partir des<br />
données et de la focalisation. La méthode présentée correspond à l’algorithme du filtrage de Wiener<br />
multi-étages [18]. Contrairement aux algorithmes de réduction de rang indépendante du signal utile, cette<br />
méthode présente l’avantage d’être robuste par rapport à la dimension du sous-espace des interférences (cf.<br />
par exemple [20, chap. 5]), ce qui est très important dans les applications pratiques. De plus, contrairement<br />
aux deux méthodes précédentes, la réduction de rang se fait ici sur le sous-espace engendré par la matrice<br />
bloquante B dans l’approche annulation de bruit. Le critère d’optimisation est le suivant :<br />
{ ∣∣w<br />
w i = argmin Vect(Li )E<br />
H Bx − φ H S x∣ ∣ 2}<br />
où i représente la dimension du sous-espace réduit. Les matrices L i sont formées de la façon suivante :<br />
⎛<br />
h H ⎞<br />
1<br />
h H 2<br />
L i = ⎜<br />
B 1<br />
⎟<br />
⎝ . ⎠<br />
B i−1 ...B 2 B 1<br />
Cette méthode correspond à la troncature de la matrice permettant de transformer un problème de filtrage<br />
de Wiener vectoriel [ ] en une succession de filtrages de Wiener scalaires. Les vecteurs h i et les matrices B i<br />
h<br />
H<br />
sont tels que i<br />
est inversible et B<br />
B i h i = 0. A chaque étage, les données x i−1 sont transformées en<br />
[ ] i<br />
[ ]<br />
di h<br />
H<br />
données = i<br />
x<br />
x i B i−1 . Enfin, les vecteurs h i sont choisis de façon proportionnels à la corrélation<br />
i<br />
croisée r xi−1 d i<br />
et de norme unité. Ce choix qui paraît intuitif si l’on suppose que l’on souhaite s’approcher<br />
du filtre optimal de Wiener à l’étage i, à savoir R −1<br />
x i<br />
r xi d i<br />
, sans connaissance de la matrice de covariance<br />
R xi . De plus, ce choix permet de justifier l’équivalence entre le filtrage de Wiener vectoriel et le filtrage<br />
de Wiener multi-étages [18]. A titre d’illustration, Fig.2.2 représente un filtrage de Wiener multi-étages<br />
de dimension 3.<br />
Estimation de la dimension du sous-espace des interférences<br />
Jusqu’à présent, nous avons supposé connue la dimension du sous-espace des interférences. Cependant,<br />
dans la pratique cette dernière est inconnue et doit être estimée à partir des données. Des algorithmes<br />
d’estimation sont alors souvent utilisés dont les plus courants utilisent les critères AIC (Akaike<br />
Information Criterium) et MDL (Minimum Description Length). Ces derniers ont été introduits par<br />
Akaike [21] et Rissanen et Schwartz [22], [23]. Ensuite, ils ont été utilisés en traitement d’antenne en<br />
1985 par Wax et Kailath [24]. Les deux critères sont construits de la même manière, en introduisant la













