

TH`ESE DE DOCTORAT DE L'UNIVERSITà PARIS 6 Spécialité ...
TH`ESE DE DOCTORAT DE L'UNIVERSITà PARIS 6 Spécialité ...
TH`ESE DE DOCTORAT DE L'UNIVERSITà PARIS 6 Spécialité ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
8.5 Conclusion 139<br />
0<br />
−5<br />
SINR normalise (dB)<br />
−10<br />
−15<br />
−20<br />
−25<br />
BDSTAP a priori (Q=1)<br />
BDSTAP a priori (Q=2)<br />
BDSTAP (Q=1)<br />
BDSTAP (Q=2)<br />
STAP−EVP<br />
−30<br />
0 20 40 60 80 100 120<br />
Nombre d’echantillons<br />
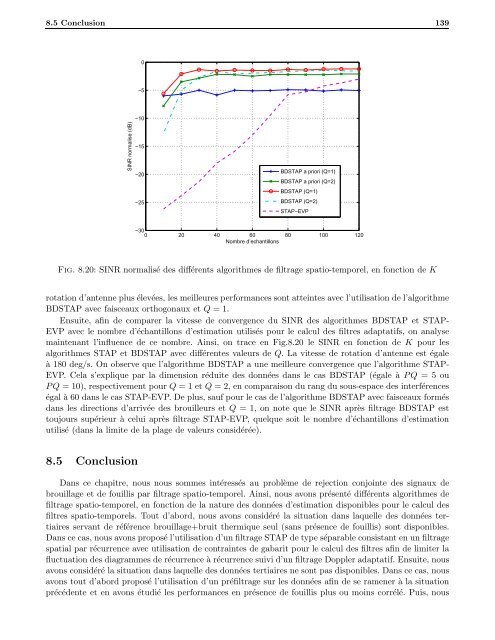
Fig. 8.20: SINR normalisé des différents algorithmes de filtrage spatio-temporel, en fonction de K<br />
rotation d’antenne plus élevées, les meilleures performances sont atteintes avec l’utilisation de l’algorithme<br />
BDSTAP avec faisceaux orthogonaux et Q = 1.<br />
Ensuite, afin de comparer la vitesse de convergence du SINR des algorithmes BDSTAP et STAP-<br />
EVP avec le nombre d’échantillons d’estimation utilisés pour le calcul des filtres adaptatifs, on analyse<br />
maintenant l’influence de ce nombre. Ainsi, on trace en Fig.8.20 le SINR en fonction de K pour les<br />
algorithmes STAP et BDSTAP avec différentes valeurs de Q. La vitesse de rotation d’antenne est égale<br />
à 180 deg/s. On observe que l’algorithme BDSTAP a une meilleure convergence que l’algorithme STAP-<br />
EVP. Cela s’explique par la dimension réduite des données dans le cas BDSTAP (égale à PQ = 5 ou<br />
PQ = 10), respectivement pour Q = 1 et Q = 2, en comparaison du rang du sous-espace des interférences<br />
égal à 60 dans le cas STAP-EVP. De plus, sauf pour le cas de l’algorithme BDSTAP avec faisceaux formés<br />
dans les directions d’arrivée des brouilleurs et Q = 1, on note que le SINR après filtrage BDSTAP est<br />
toujours supérieur à celui après filtrage STAP-EVP, quelque soit le nombre d’échantillons d’estimation<br />
utilisé (dans la limite de la plage de valeurs considérée).<br />
8.5 Conclusion<br />
Dans ce chapitre, nous nous sommes intéressés au problème de rejection conjointe des signaux de<br />
brouillage et de fouillis par filtrage spatio-temporel. Ainsi, nous avons présenté différents algorithmes de<br />
filtrage spatio-temporel, en fonction de la nature des données d’estimation disponibles pour le calcul des<br />
filtres spatio-temporels. Tout d’abord, nous avons considéré la situation dans laquelle des données tertiaires<br />
servant de référence brouillage+bruit thermique seul (sans présence de fouillis) sont disponibles.<br />
Dans ce cas, nous avons proposé l’utilisation d’un filtrage STAP de type séparable consistant en un filtrage<br />
spatial par récurrence avec utilisation de contraintes de gabarit pour le calcul des filtres afin de limiter la<br />
fluctuation des diagrammes de récurrence à récurrence suivi d’un filtrage Doppler adaptatif. Ensuite, nous<br />
avons considéré la situation dans laquelle des données tertiaires ne sont pas disponibles. Dans ce cas, nous<br />
avons tout d’abord proposé l’utilisation d’un préfiltrage sur les données afin de se ramener à la situation<br />
précédente et en avons étudié les performances en présence de fouillis plus ou moins corrélé. Puis, nous













