

TH`ESE DE DOCTORAT DE L'UNIVERSITà PARIS 6 Spécialité ...
TH`ESE DE DOCTORAT DE L'UNIVERSITà PARIS 6 Spécialité ...
TH`ESE DE DOCTORAT DE L'UNIVERSITà PARIS 6 Spécialité ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
138 Filtrage spatio-temporel sur radar à antenne tournante<br />
0<br />
−5<br />
SINR normalise (dB)<br />
−10<br />
−15<br />
−20<br />
−25<br />
TPSAP<br />
BDSTAP a priori (Q=1)<br />
BDSTAP a priori (Q=2)<br />
BDSTAP (Q=1)<br />
BDSTAP (Q=2)<br />
STAP−EVP<br />
−30<br />
−35<br />
−40<br />
0 20 40 60 80 100 120 140 160 180<br />
Vitesse de rotation (deg/s)<br />
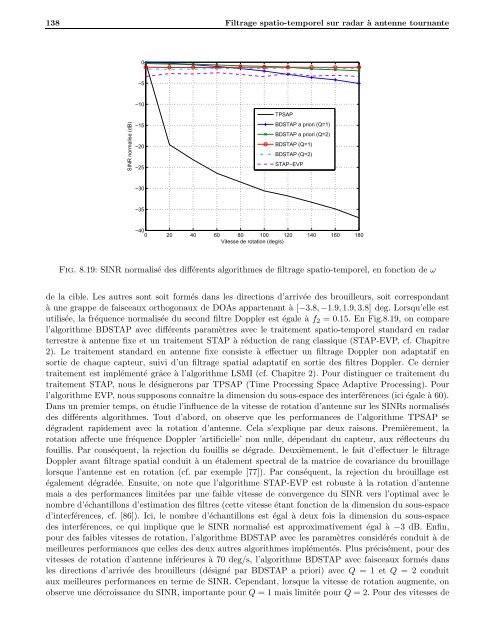
Fig. 8.19: SINR normalisé des différents algorithmes de filtrage spatio-temporel, en fonction de ω<br />
de la cible. Les autres sont soit formés dans les directions d’arrivée des brouilleurs, soit correspondant<br />
à une grappe de faisceaux orthogonaux de DOAs appartenant à [−3.8, −1.9,1.9,3.8] deg. Lorsqu’elle est<br />
utilisée, la fréquence normalisée du second filtre Doppler est égale à f 2 = 0.15. En Fig.8.19, on compare<br />
l’algorithme BDSTAP avec différents paramètres avec le traitement spatio-temporel standard en radar<br />
terrestre à antenne fixe et un traitement STAP à réduction de rang classique (STAP-EVP, cf. Chapitre<br />
2). Le traitement standard en antenne fixe consiste à effectuer un filtrage Doppler non adaptatif en<br />
sortie de chaque capteur, suivi d’un filtrage spatial adaptatif en sortie des filtres Doppler. Ce dernier<br />
traitement est implémenté grâce à l’algorithme LSMI (cf. Chapitre 2). Pour distinguer ce traitement du<br />
traitement STAP, nous le désignerons par TPSAP (Time Processing Space Adaptive Processing). Pour<br />
l’algorithme EVP, nous supposons connaître la dimension du sous-espace des interférences (ici égale à 60).<br />
Dans un premier temps, on étudie l’influence de la vitesse de rotation d’antenne sur les SINRs normalisés<br />
des différents algorithmes. Tout d’abord, on observe que les performances de l’algorithme TPSAP se<br />
dégradent rapidement avec la rotation d’antenne. Cela s’explique par deux raisons. Premièrement, la<br />
rotation affecte une fréquence Doppler ’artificielle’ non nulle, dépendant du capteur, aux réflecteurs du<br />
fouillis. Par conséquent, la rejection du fouillis se dégrade. Deuxièmement, le fait d’effectuer le filtrage<br />
Doppler avant filtrage spatial conduit à un étalement spectral de la matrice de covariance du brouillage<br />
lorsque l’antenne est en rotation (cf. par exemple [77]). Par conséquent, la rejection du brouillage est<br />
également dégradée. Ensuite, on note que l’algorithme STAP-EVP est robuste à la rotation d’antenne<br />
mais a des performances limitées par une faible vitesse de convergence du SINR vers l’optimal avec le<br />
nombre d’échantillons d’estimation des filtres (cette vitesse étant fonction de la dimension du sous-espace<br />
d’interférences, cf. [86]). Ici, le nombre d’échantillons est égal à deux fois la dimension du sous-espace<br />
des interférences, ce qui implique que le SINR normalisé est approximativement égal à −3 dB. Enfin,<br />
pour des faibles vitesses de rotation, l’algorithme BDSTAP avec les paramètres considérés conduit à de<br />
meilleures performances que celles des deux autres algorithmes implémentés. Plus précisément, pour des<br />
vitesses de rotation d’antenne inférieures à 70 deg/s, l’algorithme BDSTAP avec faisceaux formés dans<br />
les directions d’arrivée des brouilleurs (désigné par BDSTAP a priori) avec Q = 1 et Q = 2 conduit<br />
aux meilleures performances en terme de SINR. Cependant, lorsque la vitesse de rotation augmente, on<br />
observe une décroissance du SINR, importante pour Q = 1 mais limitée pour Q = 2. Pour des vitesses de













