

Mehr Info - iwb
Mehr Info - iwb
Mehr Info - iwb

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
2 Stand von Wissenschaft und Technik<br />
des Roboters unter Last kompensiert (VÖLLNER ET AL. 2006). Die konkurrenzfähige<br />
Qualität der Schweißergebnisse solcher Systeme konnte über einen Vergleich<br />
mit Schweißergebnissen von Sonderanlagen und Bearbeitungszentren<br />
nachgewiesen werden (VÖLLNER ET AL. 2008).<br />
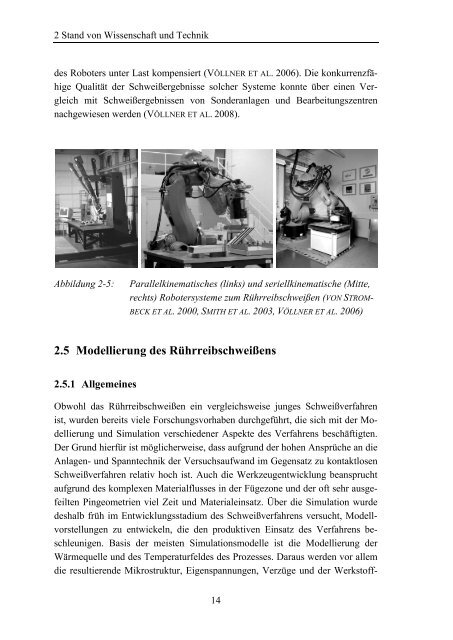
Abbildung 2-5: Parallelkinematisches (links) und seriellkinematische (Mitte,<br />
rechts) Robotersysteme zum Rührreibschweißen (VON STROM-<br />
BECK ET AL. 2000, SMITH ET AL. 2003, VÖLLNER ET AL. 2006)<br />
2.5 Modellierung des Rührreibschweißens<br />
2.5.1 Allgemeines<br />
Obwohl das Rührreibschweißen ein vergleichsweise junges Schweißverfahren<br />
ist, wurden bereits viele Forschungsvorhaben durchgeführt, die sich mit der Modellierung<br />
und Simulation verschiedener Aspekte des Verfahrens beschäftigten.<br />
Der Grund hierfür ist möglicherweise, dass aufgrund der hohen Ansprüche an die<br />
Anlagen- und Spanntechnik der Versuchsaufwand im Gegensatz zu kontaktlosen<br />
Schweißverfahren relativ hoch ist. Auch die Werkzeugentwicklung beansprucht<br />
aufgrund des komplexen Materialflusses in der Fügezone und der oft sehr ausgefeilten<br />
Pingeometrien viel Zeit und Materialeinsatz. Über die Simulation wurde<br />
deshalb früh im Entwicklungsstadium des Schweißverfahrens versucht, Modellvorstellungen<br />
zu entwickeln, die den produktiven Einsatz des Verfahrens beschleunigen.<br />
Basis der meisten Simulationsmodelle ist die Modellierung der<br />
Wärmequelle und des Temperaturfeldes des Prozesses. Daraus werden vor allem<br />
die resultierende Mikrostruktur, Eigenspannungen, Verzüge und der Werkstoff-<br />
14













