

UNIVERSITA' DEGLI STUDI DI PAVIA - Robotica
UNIVERSITA' DEGLI STUDI DI PAVIA - Robotica
UNIVERSITA' DEGLI STUDI DI PAVIA - Robotica

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
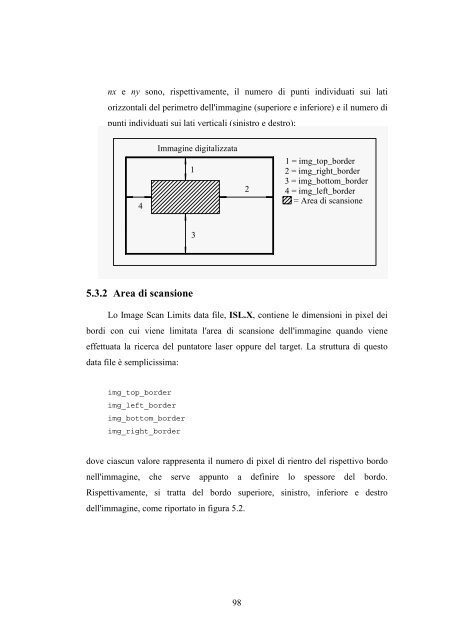
nx e ny sono, rispettivamente, il numero di punti individuati sui lati<br />
orizzontali del perimetro dell'immagine (superiore e inferiore) e il numero di<br />
punti individuati sui lati verticali (sinistro e destro);<br />
nx_top_points è la lista dei valori che individuano i punti nel lato superiore<br />
Immagine digitalizzata<br />
dell'immagine;<br />
1 = img_top_border<br />
nx_right_points è la lista 1 dei valori che individuano 2 = img_right_border<br />
i punti nel lato destro<br />
3 = img_bottom_border<br />
dell'immagine;<br />
2 4 = img_left_border<br />
nx_bottom_points è la lista dei valori che individuano = Area di i scansione<br />
4<br />
punti nel lato<br />
inferiore dell'immagine;<br />
nx_left_points è la lista 3 dei valori che individuano i punti nel lato sinistro<br />
dell'immagine.<br />
5.3.2 Area di scansione<br />
Lo Image Scan Limits data file, ISL.X, contiene le dimensioni in pixel dei<br />
bordi con cui viene limitata l'area di scansione dell'immagine quando viene<br />
effettuata la ricerca del puntatore laser oppure del target. La struttura di questo<br />
data file è semplicissima:<br />
img_top_border<br />
img_left_border<br />
img_bottom_border<br />
img_right_border<br />
dove ciascun valore rappresenta il numero di pixel di rientro del rispettivo bordo<br />
nell'immagine, che serve appunto a definire lo spessore del bordo.<br />
Rispettivamente, si tratta del bordo superiore, sinistro, inferiore e destro<br />
dell'immagine, come riportato in figura 5.2.<br />
98













