

UNIVERSITA' DEGLI STUDI DI PAVIA - Robotica
UNIVERSITA' DEGLI STUDI DI PAVIA - Robotica
UNIVERSITA' DEGLI STUDI DI PAVIA - Robotica

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
ovviamente, a parità di frequenza, parlare di durata dell’impulso e di duty-cycle è<br />
indifferente.<br />
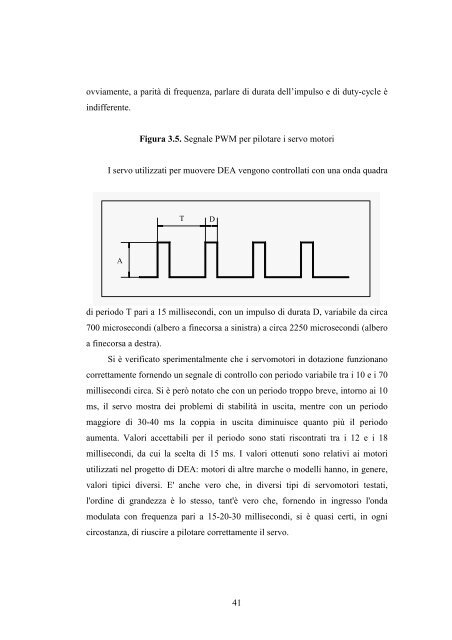
Figura 3.5. Segnale PWM per pilotare i servo motori<br />
I servo utilizzati per muovere DEA vengono controllati con una onda quadra<br />
A<br />
T D<br />
di periodo T pari a 15 millisecondi, con un impulso di durata D, variabile da circa<br />
700 microsecondi (albero a finecorsa a sinistra) a circa 2250 microsecondi (albero<br />
a finecorsa a destra).<br />
Si è verificato sperimentalmente che i servomotori in dotazione funzionano<br />
correttamente fornendo un segnale di controllo con periodo variabile tra i 10 e i 70<br />
millisecondi circa. Si è però notato che con un periodo troppo breve, intorno ai 10<br />
ms, il servo mostra dei problemi di stabilità in uscita, mentre con un periodo<br />
maggiore di 30-40 ms la coppia in uscita diminuisce quanto più il periodo<br />
aumenta. Valori accettabili per il periodo sono stati riscontrati tra i 12 e i 18<br />
millisecondi, da cui la scelta di 15 ms. I valori ottenuti sono relativi ai motori<br />
utilizzati nel progetto di DEA: motori di altre marche o modelli hanno, in genere,<br />
valori tipici diversi. E' anche vero che, in diversi tipi di servomotori testati,<br />
l'ordine di grandezza è lo stesso, tant'è vero che, fornendo in ingresso l'onda<br />
modulata con frequenza pari a 15-20-30 millisecondi, si è quasi certi, in ogni<br />
circostanza, di riuscire a pilotare correttamente il servo.<br />
41













