

UNIVERSITA' DEGLI STUDI DI PAVIA - Robotica
UNIVERSITA' DEGLI STUDI DI PAVIA - Robotica
UNIVERSITA' DEGLI STUDI DI PAVIA - Robotica

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
3.6.4 Generazione di una onda quadra<br />
Per il controllo dei servomotori è necessaria un segnale modulato in PWM,<br />
come illustrato nel paragrafo 3.3.2, quindi una onda quadra di frequenza e dutycycle<br />
impostabili via software.<br />
Per poter generare tale forma d’onda è necessario, innanzitutto, selezionare<br />
un clock in ingresso al contatore: il contatore effettua un passo del conteggio in<br />
occasione del rise (transizione 0-1) o del fall (transizione 1-0) del segnale di<br />
clock, a seconda delle impostazioni.<br />
Il clock può essere selezionato tra due diversi input: generato on-board dalla<br />
scheda stessa, con la possibilità di scegliere tra la frequenze di 20 MHz oppure di<br />
100 KHz, eventualmente scalabili, oppure può essere fornito dall’esterno<br />
mediante un pin apposito nel connettore della scheda stessa. Viste le specifiche<br />
temporali richieste nel pilotaggio dei servomotori è stato impostato un clock con<br />
periodo di 10 microsecondi.<br />
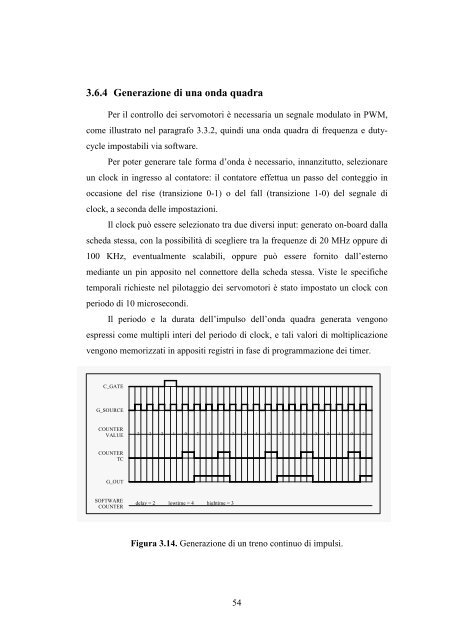
Il periodo e la durata dell’impulso dell’onda quadra generata vengono<br />
espressi come multipli interi del periodo di clock, e tali valori di moltiplicazione<br />
vengono memorizzati in appositi registri in fase di programmazione dei timer.<br />
C_GATE<br />
G_SOURCE<br />
COUNTER<br />
VALUE<br />
COUNTER<br />
TC<br />
G_OUT<br />
SOFTWARE<br />
COUNTER<br />
2 2 2 1 0 2 1 0 3 2 1 0 2 1 0 3 2 1 0 2<br />
delay = 2 lowtime = 4 hightime = 3<br />
Figura 3.14. Generazione di un treno continuo di impulsi.<br />
54













