

Physik A Teil 1: Mechanik - Physik-Institut - Universität Zürich
Physik A Teil 1: Mechanik - Physik-Institut - Universität Zürich
Physik A Teil 1: Mechanik - Physik-Institut - Universität Zürich

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
9 Dynamik des starren Körpers<br />
Bei der Mehrzahl der von uns bislang behandelten mechanischen Probleme haben wir uns<br />
nur für die translatorische Bewegung der Körper interessiert. Zur Lösung verwendeten<br />
wir die Newtonschen Prinzipien bzw. den Schwerpunktssatz. Der Drehimpulssatz kam<br />
nur bei der Zentralfeldbewegung ins Spiel. Jetzt wollen wir auch Rotationen untersuchen<br />
und uns der Einfachheit halber zunächst auf starre Körper beschränken. In ihnen sind<br />
die relativen Abstände der Atome und Moleküle konstant.<br />
9.1 Bedeutung von Schwerpunkts- und Drehimpulssatz starrer<br />
Körper<br />
Bei der Behandlung der Relativbewegungen haben wir in Kapitel 8.2 gezeigt, dass der<br />
allgemeine Bewegungszustand eines starren Körpers die Superposition einer Translation<br />
und einer Rotation ist. Zur Beschreibung dieser allgemeinen Bewegung muss man die<br />
Bahngeschwindigkeit ⃗v ◦ eines speziellen Punktes, z.B. des Schwerpunktes, und die Winkelgeschwindigkeit<br />
⃗ω kennen. Diese beiden Vektoren haben zusammen 6 Komponenten,<br />
die Zahl der Freiheitsgrade eines starren Körpers ist also sechs. Dies ist in folgender Weise<br />
einzusehen. Die Lage aller Punkte ist bestimmt, wenn 3 Punkte festgelegt sind, d.h. durch<br />
9 skalare Zahlenangaben. Da aber die Abstände der 3 Punkte untereinander fest vorgegeben<br />
sind, ist die Zahl der Freiheitsgrade 9 - 3 = 6. Diese Freiheitsgrade werden vollständig<br />
erfasst durch die 3 skalaren Gleichungen des Schwerpunktssatzes (zur Berechnung von ⃗v ◦ )<br />
und die 3 Gleichungen des Drehimpulssatzes (für ⃗ω).<br />
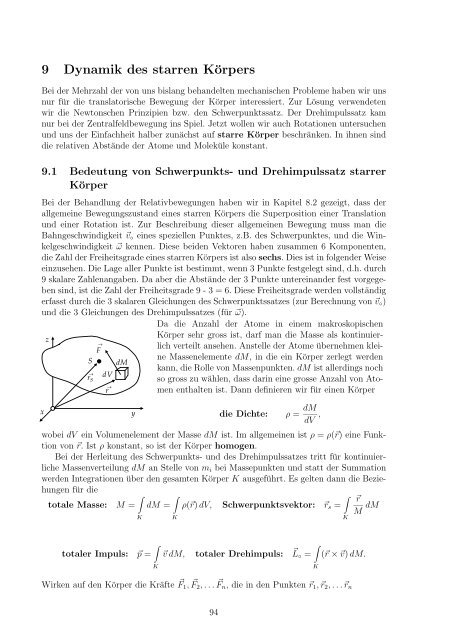
Da die Anzahl der Atome in einem makroskopischen<br />
Körper sehr gross ist, darf man die Masse als kontinuierlich<br />
verteilt ansehen. Anstelle der Atome übernehmen klei-<br />
z<br />
F →<br />
S<br />
ne Massenelemente dM, in die ein Körper zerlegt werden<br />
dM<br />
kann, die Rolle von Massenpunkten. dM ist allerdings noch<br />
→<br />
r dV s so gross zu wählen, dass darin eine grosse Anzahl von Atomen<br />
enthalten ist. Dann definieren wir für einen<br />
→<br />
r<br />
Körper<br />
x<br />
y<br />
die Dichte:<br />
ρ = dM<br />
dV ,<br />
wobei dV ein Volumenelement der Masse dM ist. Im allgemeinen ist ρ = ρ(⃗r) eine Funktion<br />
von ⃗r. Ist ρ konstant, so ist der Körper homogen.<br />
Bei der Herleitung des Schwerpunkts- und des Drehimpulssatzes tritt für kontinuierliche<br />
Massenverteilung dM an Stelle von m i bei Massepunkten und statt der Summation<br />
werden Integrationen über den gesamten Körper K ausgeführt. Es gelten dann die Beziehungen<br />
für die<br />
∫ ∫<br />
∫<br />
⃗r<br />
totale Masse: M = dM = ρ(⃗r)dV, Schwerpunktsvektor: ⃗r s =<br />
M dM<br />
K<br />
K<br />
K<br />
∫<br />
totaler Impuls: ⃗p =<br />
K<br />
∫<br />
⃗v dM, totaler Drehimpuls: L◦ ⃗ = (⃗r × ⃗v)dM.<br />
K<br />
Wirken auf den Körper die Kräfte ⃗ F 1 , ⃗ F 2 ,... ⃗ F n , die in den Punkten ⃗r 1 ,⃗r 2 ,...⃗r n<br />
94













