MECHANIKA - MSc
MECHANIKA - MSc
MECHANIKA - MSc

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Bojtár: Mechanika <strong>MSc</strong><br />
Előadásvázlat<br />
x,y,z<br />
⇒ j j , j ; ξ,<br />
η,<br />
ζ ⇒ i , i , i ; a,<br />
b,<br />
c i , i , i . (13.1)<br />
1 , 2 3<br />
1 2 3 ⇒<br />
a<br />
b<br />
c<br />
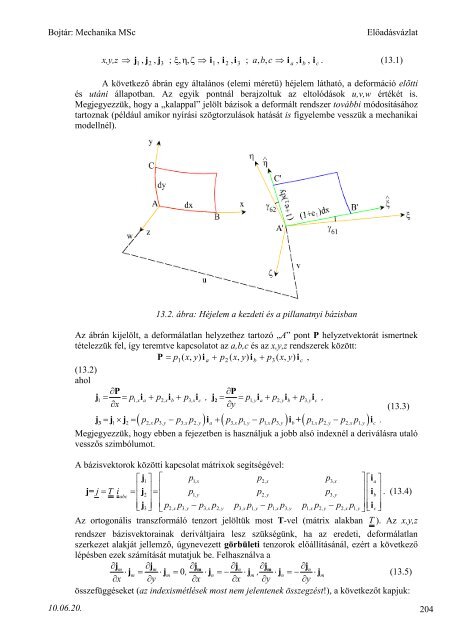
A következő ábrán egy általános (elemi méretű) héjelem látható, a deformáció előtti<br />
és utáni állapotban. Az egyik pontnál berajzoltuk az eltolódások u,v,w értékét is.<br />
Megjegyezzük, hogy a „kalappal” jelölt bázisok a deformált rendszer további módosításához<br />
tartoznak (például amikor nyírási szögtorzulások hatását is figyelembe vesszük a mechanikai<br />
modellnél).<br />
13.2. ábra: Héjelem a kezdeti és a pillanatnyi bázisban<br />
Az ábrán kijelölt, a deformálatlan helyzethez tartozó „A” pont P helyzetvektorát ismertnek<br />
tételezzük fel, így teremtve kapcsolatot az a,b,c és az x,y,z rendszerek között:<br />
P = p1( x,<br />
y)<br />
i a + p2<br />
( x,<br />
y)<br />
ib<br />
+ p3(<br />
x,<br />
y)<br />
i c ,<br />
(13.2)<br />
ahol<br />
∂P<br />
∂P<br />
j1 = = p1 ,xia + p2,xib + p<br />
3,xic , j2<br />
= = p1,yi a<br />
+ p2,yib + p<br />
3,yic<br />
,<br />
∂x<br />
∂y<br />
(13.3)<br />
3<br />
( ) ( ) ( )<br />
j = j × j = p p − p p i + p p − p p i + p p − p p i .<br />
1 2 2,x 3,y 3,x 2,y a 3,x 1,y 1,x 3,y b 1,x 2,y 2,x 1,y c<br />
Megjegyezzük, hogy ebben a fejezetben is használjuk a jobb alsó indexnél a deriválásra utaló<br />
vesszős szimbólumot.<br />
A bázisvektorok közötti kapcsolat mátrixok segítségével:<br />
⎡ j1 ⎤ ⎡ p1,x p2,x p ⎤<br />
3,x ⎡ia<br />
⎤<br />
⎢<br />
⎥<br />
j= j = T i =<br />
⎢<br />
j<br />
⎥<br />
2<br />
= p1 ,y<br />
p2,y p<br />
⎢<br />
3,y i<br />
⎥<br />
abc ⎢ ⎥ b<br />
. (13.4)<br />
⎢ ⎥ ⎢ ⎥<br />
⎢⎣ j ⎥<br />
3 ⎦<br />
⎢ p2,x p3,y p3,x p2,y p3,x p1 ,y<br />
p1 ,x<br />
p3,y p1,x p2,y p2,x p ⎥<br />
⎣ − − − ⎢<br />
1,y ⎦ ⎣i<br />
⎥<br />
c ⎦<br />
Az ortogonális transzformáló tenzort jelöltük most T-vel (mátrix alakban T ). Az x,y,z<br />
rendszer bázisvektorainak deriváltjaira lesz szükségünk, ha az eredeti, deformálatlan<br />
szerkezet alakját jellemző, úgynevezett görbületi tenzorok előállításánál, ezért a következő<br />
lépésben ezek számítását mutatjuk be. Felhasználva a<br />
∂ j j jm j jm<br />
j<br />
j ∂ ∂<br />
m m j 0 j n j j n<br />
m m<br />
, ∂ ∂<br />
⋅ = ⋅ = ⋅<br />
n<br />
= − ⋅<br />
m<br />
, ⋅ ∂<br />
n<br />
= − ⋅ jm<br />
(13.5)<br />
∂x ∂y ∂x ∂x ∂y ∂y<br />
összefüggéseket (az indexismétlések most nem jelentenek összegzést!), a következőt kapjuk:<br />
10.06.20. 204