

Identification d'efforts aux limites des poutres et plaques en flexion ...
Identification d'efforts aux limites des poutres et plaques en flexion ...
Identification d'efforts aux limites des poutres et plaques en flexion ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
CHAPITRE 6. APPROXIMATIONS ET INCERTITUDES : CAS D’UNE PLAQUE EN FLEXION<br />
<strong>et</strong> d’écart type égal à 1% de l’amplitude du déplacem<strong>en</strong>t, ∆ϕ est une variable Gaussi<strong>en</strong>ne aléatoire<br />
réelle, définie par sa moy<strong>en</strong>ne nulle, <strong>et</strong> son écart type égale à 1°, ∆w a représ<strong>en</strong>te le bruit de fond,<br />
c’est une variable aléatoire Gaussi<strong>en</strong>ne de moy<strong>en</strong>ne nulle, avec un écart type dép<strong>en</strong>dant directem<strong>en</strong>t<br />
de la chaîne d’acquisition utilisée pour la mesure. Pour ces simulations, il sera fixé à 1% de la valeur<br />
maximale du déplacem<strong>en</strong>t de la plaque. Enfin, ∆x <strong>et</strong> ∆y sont définis par leurs moy<strong>en</strong>nes nulles <strong>et</strong><br />
leurs écarts types sont ég<strong>aux</strong> à 0.5mm. C<strong>et</strong>te erreur est associée à l’incertitude liée au positionnem<strong>en</strong>t<br />
<strong>des</strong> capteurs lors <strong>des</strong> expéri<strong>en</strong>ces.<br />
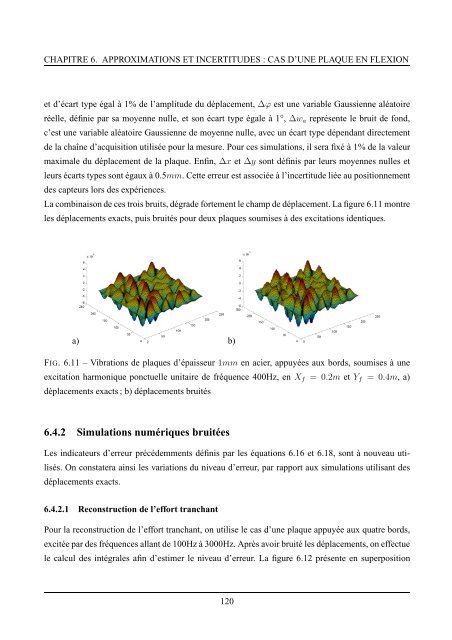
La combinaison de ces trois bruits, dégrade fortem<strong>en</strong>t le champ de déplacem<strong>en</strong>t. La figure 6.11 montre<br />
les déplacem<strong>en</strong>ts exacts, puis bruités pour deux <strong>plaques</strong> soumises à <strong>des</strong> excitations id<strong>en</strong>tiques.<br />
a) b)<br />
FIG. 6.11 – Vibrations de <strong>plaques</strong> d’épaisseur 1mm <strong>en</strong> acier, appuyées <strong>aux</strong> bords, soumises à une<br />
excitation harmonique ponctuelle unitaire de fréqu<strong>en</strong>ce 400Hz, <strong>en</strong> X f = 0.2m <strong>et</strong> Y f = 0.4m, a)<br />
déplacem<strong>en</strong>ts exacts ; b) déplacem<strong>en</strong>ts bruités<br />
6.4.2 Simulations numériques bruitées<br />
Les indicateurs d’erreur précédemm<strong>en</strong>ts définis par les équations 6.16 <strong>et</strong> 6.18, sont à nouveau utilisés.<br />
On constatera ainsi les variations du niveau d’erreur, par rapport <strong>aux</strong> simulations utilisant <strong>des</strong><br />
déplacem<strong>en</strong>ts exacts.<br />
6.4.2.1 Reconstruction de l’effort tranchant<br />
Pour la reconstruction de l’effort tranchant, on utilise le cas d’une plaque appuyée <strong>aux</strong> quatre bords,<br />
excitée par <strong>des</strong> fréqu<strong>en</strong>ces allant de 100Hz à 3000Hz. Après avoir bruité les déplacem<strong>en</strong>ts, on effectue<br />
le calcul <strong>des</strong> intégrales afin d’estimer le niveau d’erreur. La figure 6.12 prés<strong>en</strong>te <strong>en</strong> superposition<br />
120













