NXS Form 63-2600, Users Manual, Technical Data - CONTROL ...
NXS Form 63-2600, Users Manual, Technical Data - CONTROL ...
NXS Form 63-2600, Users Manual, Technical Data - CONTROL ...
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
52 PID Control Application Honeywell<br />
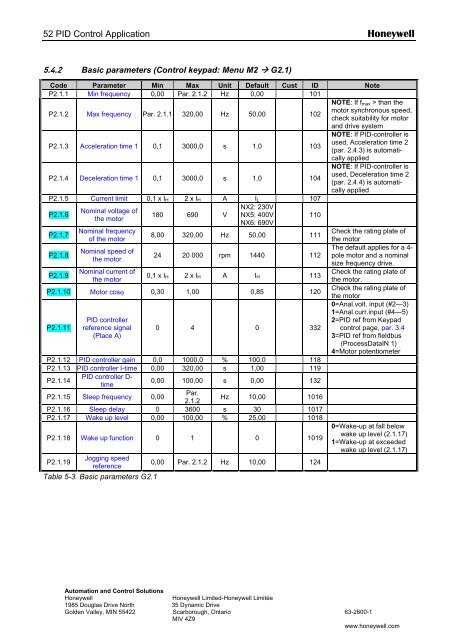
5.4.2 Basic parameters (Control keypad: Menu M2 G2.1)<br />
Code Parameter Min Max Unit Default Cust ID Note<br />
P2.1.1 Min frequency 0,00 Par. 2.1.2 Hz 0,00 101<br />
P2.1.2 Max frequency Par. 2.1.1 320,00 Hz 50,00 102<br />
NOTE: If f max > than the<br />
motor synchronous speed,<br />
check suitability for motor<br />
and drive system<br />
P2.1.3 Acceleration time 1 0,1 3000,0 s 1,0 103<br />
NOTE: If PID-controller is<br />
used, Acceleration time 2<br />
(par. 2.4.3) is automatically<br />
applied<br />
P2.1.4 Deceleration time 1 0,1 3000,0 s 1,0 104<br />
NOTE: If PID-controller is<br />
used, Deceleration time 2<br />
(par. 2.4.4) is automatically<br />
applied<br />
P2.1.5 Current limit 0,1 x I H 2 x I H A I L 107<br />
P2.1.6<br />
NX2: 230V<br />
Nominal voltage of<br />
180 690 V NX5: 400V<br />
the motor<br />
NX6: 690V<br />
110<br />
P2.1.7<br />
Nominal frequency<br />
Check the rating plate of<br />
8,00 320,00 Hz 50,00 111<br />
of the motor<br />
the motor<br />
P2.1.8<br />
P2.1.9<br />
Nominal speed of<br />
the motor<br />
Nominal current of<br />
the motor<br />
24 20 000 rpm 1440 112<br />
0,1 x I H 2 x I H A I H 113<br />
P2.1.10 Motor cosϕ 0,30 1,00 0,85 120<br />
P2.1.11<br />
PID controller<br />
reference signal<br />
(Place A)<br />
0 4 0 332<br />
P2.1.12 PID controller gain 0,0 1000,0 % 100,0 118<br />
P2.1.13 PID controller I-time 0,00 320,00 s 1,00 119<br />
P2.1.14<br />
PID controller D-<br />
time<br />
0,00 100,00 s 0,00 132<br />
P2.1.15 Sleep frequency 0,00<br />
Par.<br />
2.1.2<br />
Hz 10,00 1016<br />
P2.1.16 Sleep delay 0 3600 s 30 1017<br />
P2.1.17 Wake up level 0,00 100,00 % 25,00 1018<br />
P2.1.18 Wake up function 0 1 0 1019<br />
Jogging speed<br />
P2.1.19<br />
0,00 Par. 2.1.2 Hz 10,00 124<br />
reference<br />
Table 5-3. Basic parameters G2.1<br />
The default applies for a 4-<br />
pole motor and a nominal<br />
size frequency drive.<br />
Check the rating plate of<br />
the motor.<br />
Check the rating plate of<br />
the motor<br />
0=Anal.volt. input (#2—3)<br />
1=Anal.curr.input (#4—5)<br />
2=PID ref from Keypad<br />
control page, par. 3.4<br />
3=PID ref from fieldbus<br />
(Process<strong>Data</strong>IN 1)<br />
4=Motor potentiometer<br />
0=Wake-up at fall below<br />
wake up level (2.1.17)<br />
1=Wake-up at exceeded<br />
wake up level (2.1.17)<br />
Automation and Control Solutions<br />
Honeywell<br />
Honeywell Limited-Honeywell Limitée<br />
1985 Douglas Drive North 35 Dynamic Drive<br />
Golden Valley, MIN 55422 Scarborough, Ontario <strong>63</strong>-<strong>2600</strong>-1<br />
MIV 4Z9<br />
www.honeywell.com