NXS Form 63-2600, Users Manual, Technical Data - CONTROL ...
NXS Form 63-2600, Users Manual, Technical Data - CONTROL ...
NXS Form 63-2600, Users Manual, Technical Data - CONTROL ...
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
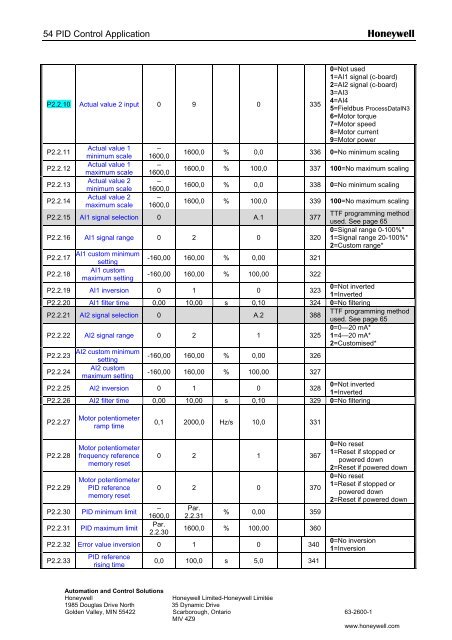
54 PID Control Application Honeywell<br />
P2.2.10 Actual value 2 input 0 9 0 335<br />
P2.2.11<br />
P2.2.12<br />
P2.2.13<br />
P2.2.14<br />
Actual value 1<br />
minimum scale<br />
Actual value 1<br />
maximum scale<br />
Actual value 2<br />
minimum scale<br />
Actual value 2<br />
maximum scale<br />
–<br />
1600,0<br />
–<br />
1600,0<br />
–<br />
1600,0<br />
–<br />
1600,0<br />
0=Not used<br />
1=AI1 signal (c-board)<br />
2=AI2 signal (c-board)<br />
3=AI3<br />
4=AI4<br />
5=Fieldbus Process<strong>Data</strong>IN3<br />
6=Motor torque<br />
7=Motor speed<br />
8=Motor current<br />
9=Motor power<br />
1600,0 % 0,0 336 0=No minimum scaling<br />
1600,0 % 100,0 337 100=No maximum scaling<br />
1600,0 % 0,0 338 0=No minimum scaling<br />
1600,0 % 100,0 339 100=No maximum scaling<br />
P2.2.15 AI1 signal selection 0 A.1 377<br />
P2.2.16 AI1 signal range 0 2 0 320<br />
TTF programming method<br />
used. See page 65<br />
0=Signal range 0-100%*<br />
1=Signal range 20-100%*<br />
2=Custom range*<br />
AI1 custom minimum<br />
P2.2.17<br />
setting<br />
-160,00 160,00 % 0,00 321<br />
P2.2.18<br />
AI1 custom<br />
maximum setting<br />
-160,00 160,00 % 100,00 322<br />
P2.2.19 AI1 inversion 0 1 0 323<br />
0=Not inverted<br />
1=Inverted<br />
P2.2.20 AI1 filter time 0,00 10,00 s 0,10 324 0=No filtering<br />
P2.2.21 AI2 signal selection 0 A.2 388<br />
TTF programming method<br />
used. See page 65<br />
P2.2.22 AI2 signal range 0 2 1 325<br />
0=0—20 mA*<br />
1=4—20 mA*<br />
2=Customised*<br />
AI2 custom minimum<br />
P2.2.23<br />
setting<br />
-160,00 160,00 % 0,00 326<br />
P2.2.24<br />
AI2 custom<br />
maximum setting<br />
-160,00 160,00 % 100,00 327<br />
P2.2.25 AI2 inversion 0 1 0 328<br />
0=Not inverted<br />
1=Inverted<br />
P2.2.26 AI2 filter time 0,00 10,00 s 0,10 329 0=No filtering<br />
P2.2.27<br />
Motor potentiometer<br />
ramp time<br />
0,1 2000,0 Hz/s 10,0 331<br />
P2.2.28<br />
P2.2.29<br />
P2.2.30<br />
P2.2.31<br />
Motor potentiometer<br />
frequency reference<br />
memory reset<br />
Motor potentiometer<br />
PID reference<br />
memory reset<br />
PID minimum limit<br />
PID maximum limit<br />
0 2 1 367<br />
0 2 0 370<br />
–<br />
1600,0<br />
Par.<br />
2.2.30<br />
Par.<br />
2.2.31<br />
% 0,00 359<br />
1600,0 % 100,00 360<br />
P2.2.32 Error value inversion 0 1 0 340<br />
P2.2.33<br />
PID reference<br />
rising time<br />
0,0 100,0 s 5,0 341<br />
0=No reset<br />
1=Reset if stopped or<br />
powered down<br />
2=Reset if powered down<br />
0=No reset<br />
1=Reset if stopped or<br />
powered down<br />
2=Reset if powered down<br />
0=No inversion<br />
1=Inversion<br />
Automation and Control Solutions<br />
Honeywell<br />
Honeywell Limited-Honeywell Limitée<br />
1985 Douglas Drive North 35 Dynamic Drive<br />
Golden Valley, MIN 55422 Scarborough, Ontario <strong>63</strong>-<strong>2600</strong>-1<br />
MIV 4Z9<br />
www.honeywell.com