

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
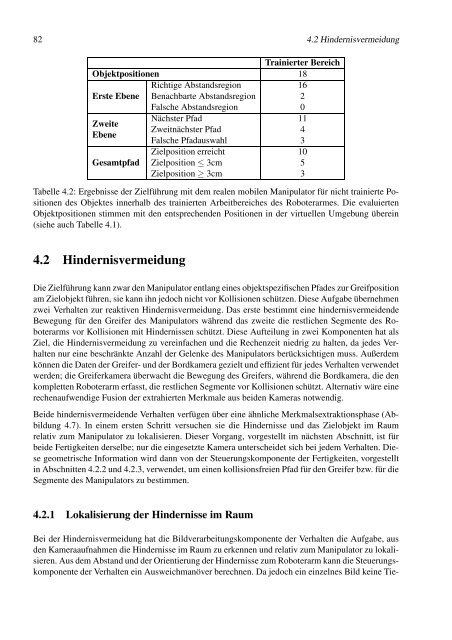
82 4.2 Hindernisvermeidung<br />
Objektpositionen<br />
Trainierter Bereich<br />
18<br />
Richtige Abstandsregion 16<br />
Erste Ebene Benachbarte Abstandsregion 2<br />
Falsche Abstandsregion 0<br />
Zweite<br />
Ebene<br />
Nächster Pfad<br />
Zweitnächster Pfad<br />
Falsche Pfadauswahl<br />
11<br />
4<br />
3<br />
Zielposition erreicht 10<br />
Gesamtpfad Zielposition ≤ 3cm 5<br />
Zielposition ≥ 3cm 3<br />
Tabelle 4.2: Ergebnisse der Zielführung mit dem realen mobilen Manipulator für nicht trainierte Positionen<br />
des Objektes innerhalb des trainierten Arbeitbereiches des Roboterarmes. Die evaluierten<br />
Objektpositionen stimmen mit den entsprechenden Positionen in der virtuellen Umgebung überein<br />
(siehe auch Tabelle 4.1).<br />
4.2 Hindernisvermeidung<br />
Die Zielführung kann zwar den Manipulator entlang eines objektspezifischen Pfades zur Greifposition<br />
am Zielobjekt führen, sie kann ihn jedoch nicht vor Kollisionen schützen. Diese Aufgabe übernehmen<br />
zwei Verhalten zur reaktiven Hindernisvermeidung. Das erste bestimmt eine hindernisvermeidende<br />
Bewegung für den Greifer des Manipulators während das zweite die restlichen Segmente des Roboterarms<br />
vor Kollisionen mit Hindernissen schützt. Diese Aufteilung in zwei Komponenten hat als<br />
Ziel, die Hindernisvermeidung zu vereinfachen und die Rechenzeit niedrig zu halten, da jedes Verhalten<br />
nur eine beschränkte Anzahl der Gelenke des Manipulators berücksichtigen muss. Außerdem<br />
können die Daten der Greifer- und der Bordkamera gezielt und effizient für jedes Verhalten verwendet<br />
werden; die Greiferkamera überwacht die Bewegung des Greifers, während die Bordkamera, die den<br />
kompletten Roboterarm erfasst, die restlichen Segmente vor Kollisionen schützt. Alternativ wäre eine<br />
rechenaufwendige Fusion der extrahierten Merkmale aus beiden Kameras notwendig.<br />
Beide hindernisvermeidende Verhalten verfügen über eine ähnliche Merkmalsextraktionsphase (Abbildung<br />
4.7). In einem ersten Schritt versuchen sie die Hindernisse und das Zielobjekt im Raum<br />
relativ zum Manipulator zu lokalisieren. Dieser Vorgang, vorgestellt im nächsten Abschnitt, ist für<br />
beide Fertigkeiten derselbe; nur die eingesetzte Kamera unterscheidet sich bei jedem Verhalten. Diese<br />
geometrische Information wird dann von der Steuerungskomponente der Fertigkeiten, vorgestellt<br />
in Abschnitten 4.2.2 und 4.2.3, verwendet, um einen kollisionsfreien Pfad für den Greifer bzw. für die<br />
Segmente des Manipulators zu bestimmen.<br />
4.2.1 Lokalisierung der Hindernisse im Raum<br />
Bei der Hindernisvermeidung hat die Bildverarbeitungskomponente der Verhalten die Aufgabe, aus<br />
den Kameraaufnahmen die Hindernisse im Raum zu erkennen und relativ zum Manipulator zu lokalisieren.<br />
Aus dem Abstand und der Orientierung der Hindernisse zum Roboterarm kann die Steuerungskomponente<br />
der Verhalten ein Ausweichmanöver berechnen. Da jedoch ein einzelnes Bild keine Tie-














