

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
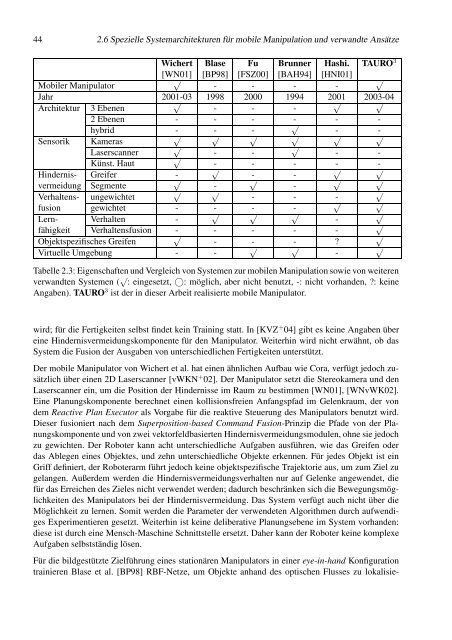
44 2.6 Spezielle Systemarchitekturen für mobile Manipulation und verwandte Ansätze<br />
Wichert Blase Fu Brunner Hashi. TAURO3 Mobiler Manipulator<br />
[WN01]<br />
√<br />
[BP98]<br />
-<br />
[FSZ00]<br />
-<br />
[BAH94]<br />
-<br />
[HNI01]<br />
-<br />
√<br />
Jahr<br />
Architektur 3 Ebenen<br />
2001-03<br />
√<br />
1998<br />
-<br />
2000<br />
-<br />
1994<br />
-<br />
2001<br />
√<br />
2003-04<br />
√<br />
2 Ebenen<br />
hybrid<br />
Sensorik Kameras<br />
Laserscanner<br />
Künst. Haut<br />
Hindernis- Greifer<br />
vermeidung Segmente<br />
Verhaltens- ungewichtet<br />
fusion gewichtet<br />
Lern- Verhalten<br />
fähigkeit Verhaltensfusion<br />
Objektspezifisches Greifen<br />
Virtuelle Umgebung<br />
-<br />
-<br />
√<br />
√<br />
√<br />
√<br />
-<br />
√<br />
-<br />
-<br />
-<br />
√<br />
-<br />
-<br />
-<br />
√<br />
-<br />
-<br />
√<br />
-<br />
√<br />
-<br />
√<br />
-<br />
-<br />
-<br />
-<br />
-<br />
√<br />
-<br />
-<br />
√<br />
-<br />
-<br />
-<br />
√<br />
-<br />
-<br />
√<br />
-<br />
√<br />
√<br />
√<br />
-<br />
-<br />
-<br />
-<br />
-<br />
√<br />
-<br />
-<br />
√<br />
-<br />
-<br />
√<br />
-<br />
-<br />
√<br />
√<br />
√<br />
-<br />
-<br />
-<br />
?<br />
-<br />
-<br />
-<br />
√<br />
-<br />
-<br />
√<br />
√<br />
√<br />
√<br />
√<br />
√<br />
√<br />
√<br />
Tabelle 2.3: Eigenschaften und Vergleich von Systemen zur mobilen Manipulation sowie von weiteren<br />
verwandten Systemen ( √ : eingesetzt, ○: möglich, aber nicht benutzt, -: nicht vorhanden, ?: keine<br />
Angaben). TAURO 3 ist der in dieser Arbeit realisierte mobile Manipulator.<br />
wird; für die Fertigkeiten selbst findet kein Training statt. In [KVZ + 04] gibt es keine Angaben über<br />
eine Hindernisvermeidungskomponente für den Manipulator. Weiterhin wird nicht erwähnt, ob das<br />
System die Fusion der Ausgaben von unterschiedlichen Fertigkeiten unterstützt.<br />
Der mobile Manipulator von Wichert et al. hat einen ähnlichen Aufbau wie Cora, verfügt jedoch zusätzlich<br />
über einen 2D Laserscanner [vWKN + 02]. Der Manipulator setzt die Stereokamera und den<br />
Laserscanner ein, um die Position der Hindernisse im Raum zu bestimmen [WN01], [WNvWK02].<br />
Eine Planungskomponente berechnet einen kollisionsfreien Anfangspfad im Gelenkraum, der von<br />
dem Reactive Plan Executor als Vorgabe für die reaktive Steuerung des Manipulators benutzt wird.<br />
Dieser fusioniert nach dem Superposition-based Command Fusion-Prinzip die Pfade von der Planungskomponente<br />
und von zwei vektorfeldbasierten Hindernisvermeidungsmodulen, ohne sie jedoch<br />
zu gewichten. Der Roboter kann acht unterschiedliche Aufgaben ausführen, wie das Greifen oder<br />
das Ablegen eines Objektes, und zehn unterschiedliche Objekte erkennen. Für jedes Objekt ist ein<br />
Griff definiert, der Roboterarm führt jedoch keine objektspezifische Trajektorie aus, um zum Ziel zu<br />
gelangen. Außerdem werden die Hindernisvermeidungsverhalten nur auf Gelenke angewendet, die<br />
für das Erreichen des Zieles nicht verwendet werden; dadurch beschränken sich die Bewegungsmöglichkeiten<br />
des Manipulators bei der Hindernisvermeidung. Das System verfügt auch nicht über die<br />
Möglichkeit zu lernen. Somit werden die Parameter der verwendeten Algorithmen durch aufwendiges<br />
Experimentieren gesetzt. Weiterhin ist keine deliberative Planungsebene im System vorhanden:<br />
diese ist durch eine Mensch-Maschine Schnittstelle ersetzt. Daher kann der Roboter keine komplexe<br />
Aufgaben selbstständig lösen.<br />
Für die bildgestützte Zielführung eines stationären Manipulators in einer eye-in-hand Konfiguration<br />
trainieren Blase et al. [BP98] RBF-Netze, um Objekte anhand des optischen Flusses zu lokalisie-














