

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
124 5.7 Bewertung und Einordnung des implementierten Koordinationsmechanismus<br />
das Objekt ins Zentrum des Bildes der Greiferkamera rückt, desto niedriger wird dann die Gewichtung<br />
des Zielfolgens.<br />
Analog zu dem Experiment in der virtuellen Umgebung wird auch ein Greifversuch mit dem realen<br />
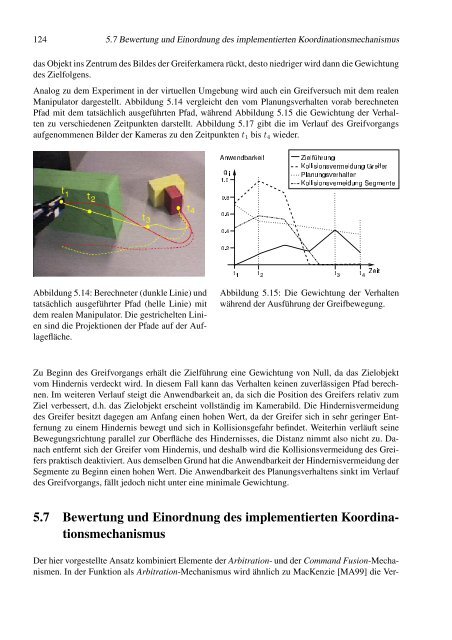
Manipulator dargestellt. Abbildung 5.14 vergleicht den vom Planungsverhalten vorab berechneten<br />
Pfad mit dem tatsächlich ausgeführten Pfad, während Abbildung 5.15 die Gewichtung der Verhalten<br />
zu verschiedenen Zeitpunkten darstellt. Abbildung 5.17 gibt die im Verlauf des Greifvorgangs<br />
aufgenommenen Bilder der Kameras zu den Zeitpunkten t1 bis t4 wieder.<br />
Abbildung 5.14: Berechneter (dunkle Linie) und<br />
tatsächlich ausgeführter Pfad (helle Linie) mit<br />
dem realen Manipulator. Die gestrichelten Linien<br />
sind die Projektionen der Pfade auf der Auflagefläche.<br />
Abbildung 5.15: Die Gewichtung der Verhalten<br />
während der Ausführung der Greifbewegung.<br />
Zu Beginn des Greifvorgangs erhält die Zielführung eine Gewichtung von Null, da das Zielobjekt<br />
vom Hindernis verdeckt wird. In diesem Fall kann das Verhalten keinen zuverlässigen Pfad berechnen.<br />
Im weiteren Verlauf steigt die Anwendbarkeit an, da sich die Position des Greifers relativ zum<br />
Ziel verbessert, d.h. das Zielobjekt erscheint vollständig im Kamerabild. Die Hindernisvermeidung<br />
des Greifer besitzt dagegen am Anfang einen hohen Wert, da der Greifer sich in sehr geringer Entfernung<br />
zu einem Hindernis bewegt und sich in Kollisionsgefahr befindet. Weiterhin verläuft seine<br />
Bewegungsrichtung parallel zur Oberfläche des Hindernisses, die Distanz nimmt also nicht zu. Danach<br />
entfernt sich der Greifer vom Hindernis, und deshalb wird die Kollisionsvermeidung des Greifers<br />
praktisch deaktiviert. Aus demselben Grund hat die Anwendbarkeit der Hindernisvermeidung der<br />
Segmente zu Beginn einen hohen Wert. Die Anwendbarkeit des Planungsverhaltens sinkt im Verlauf<br />
des Greifvorgangs, fällt jedoch nicht unter eine minimale Gewichtung.<br />
5.7 Bewertung und Einordnung des implementierten Koordinationsmechanismus<br />
Der hier vorgestellte Ansatz kombiniert Elemente der Arbitration- und der Command Fusion-Mechanismen.<br />
In der Funktion als Arbitration-Mechanismus wird ähnlich zu MacKenzie [MA99] die Ver-














