

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
4.2 Hindernisvermeidung 87<br />
Stochastisches<br />
Teach−In<br />
Steuerungskomponente<br />
Merkmale<br />
& Bewertungen<br />
s<br />
Hindernis 1<br />
Hindernis n<br />
Bestimmung des<br />
Merkmalsvektors<br />
Merkmalsextraktion<br />
+<br />
Pfad<br />
Pfadgenerierung Trajektorieregler<br />
Lokalisierung<br />
der Objekte<br />
Bildvorverarbeitung<br />
zum Abgleich mit den<br />
virtuellen Kameras<br />
Lageänderung Greifer<br />
Gelenk−<br />
geschwindig−<br />
keiten<br />
∆θ<br />
Positionsdaten<br />
θ<br />
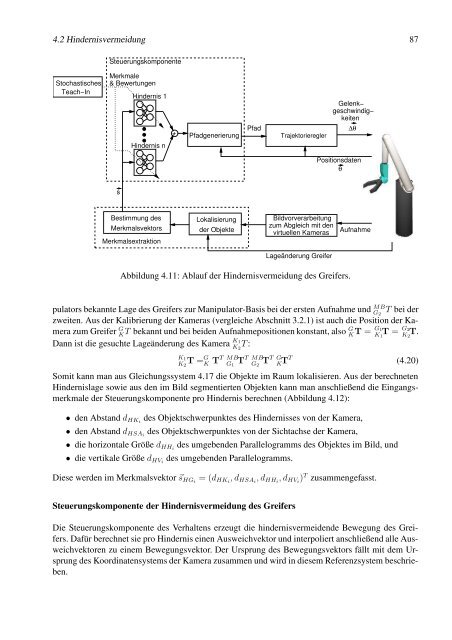
Abbildung 4.11: Ablauf der Hindernisvermeidung des Greifers.<br />
Aufnahme<br />
pulators bekannte Lage des Greifers zur Manipulator-Basis bei der ersten Aufnahme und MBT<br />
bei der<br />
G2<br />
zweiten. Aus der Kalibrierung der Kameras (vergleiche Abschnitt 3.2.1) ist auch die Position der Kamera<br />
zum Greifer G KT bekannt und bei beiden Aufnahmepositionen konstant, also G G1 G2<br />
KT = T = K1 K2T. T :<br />
Dann ist die gesuchte Lageänderung des Kamera K1<br />
K2<br />
K1<br />
K2 T =G K<br />
MB MB<br />
TT TT G1 G2 TT G KTT (4.20)<br />
Somit kann man aus Gleichungssystem 4.17 die Objekte im Raum lokalisieren. Aus der berechneten<br />
Hindernislage sowie aus den im Bild segmentierten Objekten kann man anschließend die Eingangsmerkmale<br />
der Steuerungskomponente pro Hindernis berechnen (Abbildung 4.12):<br />
• den Abstand dHKi des Objektschwerpunktes des Hindernisses von der Kamera,<br />
• den Abstand dHSAi des Objektschwerpunktes von der Sichtachse der Kamera,<br />
• die horizontale Größe dHHi des umgebenden Parallelogramms des Objektes im Bild, und<br />
• die vertikale Größe dHVi des umgebenden Parallelogramms.<br />
Diese werden im Merkmalsvektor �sHGi = (dHKi , dHSAi , dHHi , dHVi )T zusammengefasst.<br />
Steuerungskomponente der Hindernisvermeidung des Greifers<br />
Die Steuerungskomponente des Verhaltens erzeugt die hindernisvermeidende Bewegung des Greifers.<br />
Dafür berechnet sie pro Hindernis einen Ausweichvektor und interpoliert anschließend alle Ausweichvektoren<br />
zu einem Bewegungsvektor. Der Ursprung des Bewegungsvektors fällt mit dem Ursprung<br />
des Koordinatensystems der Kamera zusammen und wird in diesem Referenzsystem beschrieben.














