

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
56 3.2 Abgleich der Daten virtueller und realer Kameras<br />
v<br />
u<br />
Bildebene<br />
{I}<br />
(x, y)<br />
Bildhauptpunkt<br />
f<br />
Brennpunkt<br />
{K}<br />
Kamerakoordinatensystem<br />
Sichtachse der Kamera<br />
Weltkoordinatensystem<br />
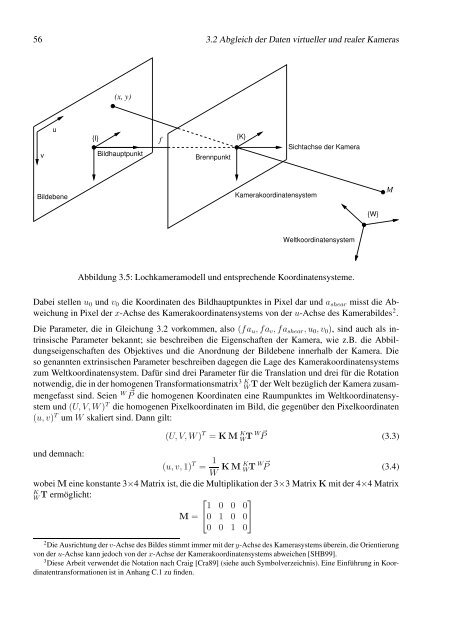
Abbildung 3.5: Lochkameramodell und entsprechende Koordinatensysteme.<br />
Dabei stellen u0 und v0 die Koordinaten des Bildhauptpunktes in Pixel dar und ashear misst die Abweichung<br />
in Pixel der x-Achse des Kamerakoordinatensystems von der u-Achse des Kamerabildes 2 .<br />
Die Parameter, die in Gleichung 3.2 vorkommen, also (fau, fav, fashear, u0, v0), sind auch als intrinsische<br />
Parameter bekannt; sie beschreiben die Eigenschaften der Kamera, wie z.B. die Abbildungseigenschaften<br />
des Objektives und die Anordnung der Bildebene innerhalb der Kamera. Die<br />
so genannten extrinsischen Parameter beschreiben dagegen die Lage des Kamerakoordinatensystems<br />
zum Weltkoordinatensystem. Dafür sind drei Parameter für die Translation und drei für die Rotation<br />
notwendig, die in der homogenen Transformationsmatrix3 K W T der Welt bezüglich der Kamera zusammengefasst<br />
sind. Seien W P� die homogenen Koordinaten eine Raumpunktes im Weltkoordinatensystem<br />
und (U, V, W ) T die homogenen Pixelkoordinaten im Bild, die gegenüber den Pixelkoordinaten<br />
(u, v) T um W skaliert sind. Dann gilt:<br />
(U, V, W ) T = K M K WT W� P (3.3)<br />
und demnach:<br />
(u, v, 1) T = 1<br />
W K M K WT W� P (3.4)<br />
wobei M eine konstante 3×4 Matrix ist, die die Multiplikation der 3×3 Matrix K mit der 4×4 Matrix<br />
K<br />
W T ermöglicht:<br />
⎡<br />
1 0 0<br />
⎤<br />
0<br />
M = ⎣0<br />
1 0 0⎦<br />
0 0 1 0<br />
2 Die Ausrichtung der v-Achse des Bildes stimmt immer mit der y-Achse des Kamerasystems überein, die Orientierung<br />
von der u-Achse kann jedoch von der x-Achse der Kamerakoordinatensystems abweichen [SHB99].<br />
3 Diese Arbeit verwendet die Notation nach Craig [Cra89] (siehe auch Symbolverzeichnis). Eine Einführung in Koordinatentransformationen<br />
ist in Anhang C.1 zu finden.<br />
{W}<br />
M














