- Seite 1:
Bildgestütztes Teach-In eines mobi
- Seite 4 und 5:
ii und der Koordinationsmechanismus
- Seite 7 und 8:
Inhaltsverzeichnis Abbildungsverzei
- Seite 9 und 10:
INHALTSVERZEICHNIS vii 5.3 Verhalte
- Seite 11 und 12:
Abbildungsverzeichnis 1.1 Anwendung
- Seite 13 und 14:
ABBILDUNGSVERZEICHNIS xi 4.10 Epipo
- Seite 15 und 16:
ABBILDUNGSVERZEICHNIS xiii C.11 Rad
- Seite 17 und 18:
Tabellenverzeichnis 2.1 Gemeinsamke
- Seite 19 und 20:
Kapitel 1 Einleitung In der industr
- Seite 21 und 22:
1.2 Mobile Manipulation mit Hindern
- Seite 23 und 24:
1.2 Mobile Manipulation mit Hindern
- Seite 25 und 26:
1.3 Gliederung der Arbeit 7 Grund d
- Seite 27 und 28:
Kapitel 2 Einführung in die mobile
- Seite 29 und 30:
2.1 Allgemeine Systemarchitekturen
- Seite 31 und 32:
2.2 Reaktive Verhalten für Manipul
- Seite 33 und 34:
2.2 Reaktive Verhalten für Manipul
- Seite 35 und 36:
2.2 Reaktive Verhalten für Manipul
- Seite 37 und 38:
2.2 Reaktive Verhalten für Manipul
- Seite 39 und 40:
2.2 Reaktive Verhalten für Manipul
- Seite 41 und 42:
2.2 Reaktive Verhalten für Manipul
- Seite 43 und 44:
2.2 Reaktive Verhalten für Manipul
- Seite 45 und 46:
2.2 Reaktive Verhalten für Manipul
- Seite 47 und 48:
2.3 Verfahren zur Koordination reak
- Seite 49 und 50:
2.3 Verfahren zur Koordination reak
- Seite 51 und 52:
2.3 Verfahren zur Koordination reak
- Seite 53 und 54:
2.4 Planung 35 die Welt, die aus ei
- Seite 55 und 56:
2.4 Planung 37 liche Zustand nicht
- Seite 57 und 58:
2.4 Planung 39 eine Suche im Graphe
- Seite 59 und 60:
2.5 Virtuelle Realität und Robotik
- Seite 61 und 62:
2.6 Spezielle Systemarchitekturen f
- Seite 63 und 64:
2.6 Spezielle Systemarchitekturen f
- Seite 65 und 66:
2.7 Ein Konzept zur mobilen Manipul
- Seite 67 und 68:
2.8 Abgrenzung von anderen Arbeiten
- Seite 69 und 70:
Kapitel 3 Eine virtuelle Umgebung z
- Seite 71 und 72:
3.2 Abgleich der Daten virtueller u
- Seite 73 und 74:
3.2 Abgleich der Daten virtueller u
- Seite 75 und 76:
3.2 Abgleich der Daten virtueller u
- Seite 77 und 78:
3.2 Abgleich der Daten virtueller u
- Seite 79 und 80:
3.2 Abgleich der Daten virtueller u
- Seite 81 und 82:
3.3 Teach-In in virtuellen Umgebung
- Seite 83 und 84:
3.3 Teach-In in virtuellen Umgebung
- Seite 85 und 86:
3.3 Teach-In in virtuellen Umgebung
- Seite 87 und 88:
3.3 Teach-In in virtuellen Umgebung
- Seite 89 und 90:
3.3 Teach-In in virtuellen Umgebung
- Seite 91 und 92:
Kapitel 4 Bildgestützte reaktive V
- Seite 93 und 94:
4.1 Bildgestützte Zielführung 75
- Seite 95 und 96:
4.1 Bildgestützte Zielführung 77
- Seite 97 und 98:
4.1 Bildgestützte Zielführung 79
- Seite 99 und 100:
4.1 Bildgestützte Zielführung 81
- Seite 101 und 102:
4.2 Hindernisvermeidung 83 Steuerun
- Seite 103 und 104:
4.2 Hindernisvermeidung 85 PSfrag r
- Seite 105 und 106:
4.2 Hindernisvermeidung 87 Stochast
- Seite 107 und 108:
4.2 Hindernisvermeidung 89 Fünfte
- Seite 109 und 110: 4.2 Hindernisvermeidung 91 H 1 ρ
- Seite 111 und 112: 4.2 Hindernisvermeidung 93 Ist der
- Seite 113 und 114: 4.2 Hindernisvermeidung 95 Aus der
- Seite 115 und 116: 4.2 Hindernisvermeidung 97 Nach der
- Seite 117 und 118: 4.3 Pfadplanung im lokalen Manipula
- Seite 119 und 120: 4.3 Pfadplanung im lokalen Manipula
- Seite 121 und 122: 4.3 Pfadplanung im lokalen Manipula
- Seite 123 und 124: Kapitel 5 Verhaltensauswahl und Ver
- Seite 125 und 126: 5.2 Verhaltensauswahl 107 Rückmeld
- Seite 127 und 128: 5.2 Verhaltensauswahl 109 5.2.2 Abl
- Seite 129 und 130: 5.3 Verhaltenskoordination 111 Verh
- Seite 131 und 132: 5.3 Verhaltenskoordination 113 Nach
- Seite 133 und 134: 5.3 Verhaltenskoordination 115 5.3.
- Seite 135 und 136: PSfrag replacements 5.3 Verhaltensk
- Seite 137 und 138: 5.4 Erlernen der Verhaltenskoordina
- Seite 139 und 140: 5.5 Resultate des Trainings 121 Nac
- Seite 141 und 142: 5.6 Ergebnisse der Verhaltenskoordi
- Seite 143 und 144: 5.7 Bewertung und Einordnung des im
- Seite 145 und 146: 5.7 Bewertung und Einordnung des im
- Seite 147 und 148: Kapitel 6 Aufgabenplanung Die vermi
- Seite 149 und 150: 6.2 High-Level Planer 131 einen Pla
- Seite 151 und 152: 6.4 Weltdatenbank 133 der Erfolgsme
- Seite 153 und 154: 6.5 Geometrische Planung 135 Root =
- Seite 155 und 156: 6.5 Geometrische Planung 137 (a) (b
- Seite 157 und 158: 6.6 ComControl 139 ja nein nein nei
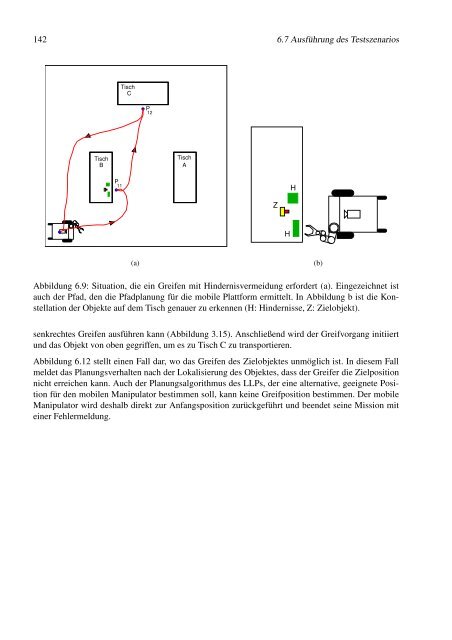
- Seite 159: 6.7 Ausführung des Testszenarios 1
- Seite 163 und 164: Kapitel 7 Zusammenfassung und Ausbl
- Seite 165 und 166: schiedliche Greifstrategien für un
- Seite 167 und 168: Literaturverzeichnis [ABD + 98a] N.
- Seite 169 und 170: LITERATURVERZEICHNIS 151 [BAHK95] B
- Seite 171 und 172: LITERATURVERZEICHNIS 153 [BRS99] R.
- Seite 173 und 174: LITERATURVERZEICHNIS 155 [DH55] J.
- Seite 175 und 176: LITERATURVERZEICHNIS 157 [GKG96] R.
- Seite 177 und 178: LITERATURVERZEICHNIS 159 [HOB + 04]
- Seite 179 und 180: LITERATURVERZEICHNIS 161 [KL94a] L.
- Seite 181 und 182: LITERATURVERZEICHNIS 163 [MCB00] E.
- Seite 183 und 184: LITERATURVERZEICHNIS 165 [PRG + 03]
- Seite 185 und 186: LITERATURVERZEICHNIS 167 [SD98] L.
- Seite 187 und 188: LITERATURVERZEICHNIS 169 [Tsa87] R.
- Seite 189 und 190: LITERATURVERZEICHNIS 171 [YYW03] Ca
- Seite 191 und 192: Anhang A Symbolverzeichnis Allgemei
- Seite 193 und 194: Symbol Bedeutung Ij Interner Zustan
- Seite 195 und 196: Anhang B Mobiler Service Roboter TA
- Seite 197 und 198: B.3 Kalibrierung der Roboterkameras
- Seite 199 und 200: Anhang C Theoretische Grundlagen C.
- Seite 201 und 202: C.1 Theoretische Grundlagen der Man
- Seite 203 und 204: C.1 Theoretische Grundlagen der Man
- Seite 205 und 206: C.1 Theoretische Grundlagen der Man
- Seite 207 und 208: C.1 Theoretische Grundlagen der Man
- Seite 209 und 210: C.1 Theoretische Grundlagen der Man
- Seite 211 und 212:
C.1 Theoretische Grundlagen der Man
- Seite 213 und 214:
C.1 Theoretische Grundlagen der Man
- Seite 215 und 216:
C.2 Epipolare Geometrie 197 und αl
- Seite 217 und 218:
C.3 Radial Basis Function Netze 199
- Seite 219 und 220:
C.3 Radial Basis Function Netze 201
- Seite 221 und 222:
C.4 Fuzzy Logik 203 gemessene Einga
- Seite 223 und 224:
C.5 Neurofuzzy 205 Maximum einer Zu
- Seite 225 und 226:
C.6 Temporal Differencing Verfahren
- Seite 227 und 228:
C.7 Bayesian Belief Networks 209 Di
- Seite 229 und 230:
C.7 Bayesian Belief Networks 211 Im
- Seite 231 und 232:
Anhang D Implementierungsdaten der
- Seite 233 und 234:
D.2 Steuerungskomponente der Hinder
- Seite 235 und 236:
D.2 Steuerungskomponente der Hinder
- Seite 237 und 238:
D.2 Steuerungskomponente der Hinder
- Seite 239 und 240:
D.2 Steuerungskomponente der Hinder
- Seite 241 und 242:
Anhang E FSAs und BBNs der vermitte
- Seite 243 und 244:
E.2 Realisierte Bayesian Belief Net
- Seite 245 und 246:
E.2 Realisierte Bayesian Belief Net
- Seite 247 und 248:
E.2 Realisierte Bayesian Belief Net
- Seite 249 und 250:
Anhang F Deliberative Ebene F.1 S-G
- Seite 251 und 252:
F.1 S-GOLOG Programm für das Tests
- Seite 253:
F.2 Weltdatenbank für das Testszen