

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
4.2 Hindernisvermeidung 91<br />
H<br />
1<br />
ρ ρ<br />
2 T<br />
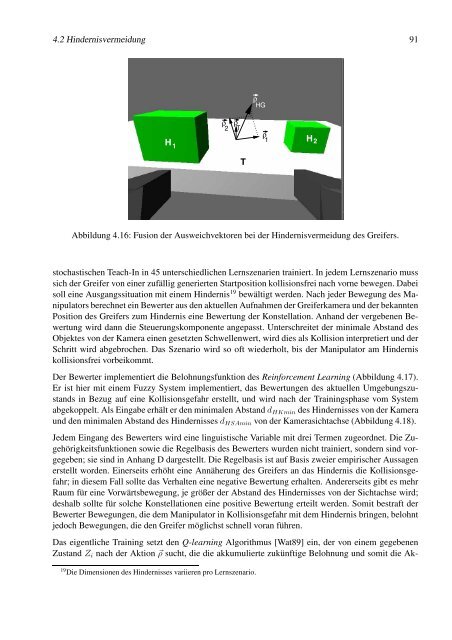
Abbildung 4.16: Fusion der Ausweichvektoren bei der Hindernisvermeidung des Greifers.<br />
stochastischen Teach-In in 45 unterschiedlichen Lernszenarien trainiert. In jedem Lernszenario muss<br />
sich der Greifer von einer zufällig generierten Startposition kollisionsfrei nach vorne bewegen. Dabei<br />
soll eine Ausgangssituation mit einem Hindernis 19 bewältigt werden. Nach jeder Bewegung des Manipulators<br />
berechnet ein Bewerter aus den aktuellen Aufnahmen der Greiferkamera und der bekannten<br />
Position des Greifers zum Hindernis eine Bewertung der Konstellation. Anhand der vergebenen Bewertung<br />
wird dann die Steuerungskomponente angepasst. Unterschreitet der minimale Abstand des<br />
Objektes von der Kamera einen gesetzten Schwellenwert, wird dies als Kollision interpretiert und der<br />
Schritt wird abgebrochen. Das Szenario wird so oft wiederholt, bis der Manipulator am Hindernis<br />
kollisionsfrei vorbeikommt.<br />
Der Bewerter implementiert die Belohnungsfunktion des Reinforcement Learning (Abbildung 4.17).<br />
Er ist hier mit einem Fuzzy System implementiert, das Bewertungen des aktuellen Umgebungszustands<br />
in Bezug auf eine Kollisionsgefahr erstellt, und wird nach der Trainingsphase vom System<br />
abgekoppelt. Als Eingabe erhält er den minimalen Abstand dHKmin des Hindernisses von der Kamera<br />
und den minimalen Abstand des Hindernisses dHSAmin von der Kamerasichtachse (Abbildung 4.18).<br />
Jedem Eingang des Bewerters wird eine linguistische Variable mit drei Termen zugeordnet. Die Zugehörigkeitsfunktionen<br />
sowie die Regelbasis des Bewerters wurden nicht trainiert, sondern sind vorgegeben;<br />
sie sind in Anhang D dargestellt. Die Regelbasis ist auf Basis zweier empirischer Aussagen<br />
erstellt worden. Einerseits erhöht eine Annäherung des Greifers an das Hindernis die Kollisionsgefahr;<br />
in diesem Fall sollte das Verhalten eine negative Bewertung erhalten. Andererseits gibt es mehr<br />
Raum für eine Vorwärtsbewegung, je größer der Abstand des Hindernisses von der Sichtachse wird;<br />
deshalb sollte für solche Konstellationen eine positive Bewertung erteilt werden. Somit bestraft der<br />
Bewerter Bewegungen, die dem Manipulator in Kollisionsgefahr mit dem Hindernis bringen, belohnt<br />
jedoch Bewegungen, die den Greifer möglichst schnell voran führen.<br />
Das eigentliche Training setzt den Q-learning Algorithmus [Wat89] ein, der von einem gegebenen<br />
Zustand Zi nach der Aktion �ρ sucht, die die akkumulierte zukünftige Belohnung und somit die Ak-<br />
19 Die Dimensionen des Hindernisses variieren pro Lernszenario.<br />
T<br />
ρ HG<br />
ρ 1<br />
H 2














