

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
2.2 Reaktive Verhalten für Manipulatoren 25<br />
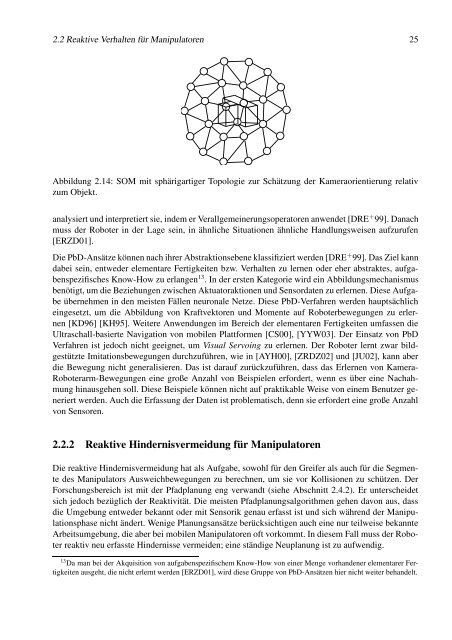
Abbildung 2.14: SOM mit sphärigartiger Topologie zur Schätzung der Kameraorientierung relativ<br />
zum Objekt.<br />
analysiert und interpretiert sie, indem er Verallgemeinerungsoperatoren anwendet [DRE + 99]. Danach<br />
muss der Roboter in der Lage sein, in ähnliche Situationen ähnliche Handlungsweisen aufzurufen<br />
[ERZD01].<br />
Die PbD-Ansätze können nach ihrer Abstraktionsebene klassifiziert werden [DRE + 99]. Das Ziel kann<br />
dabei sein, entweder elementare Fertigkeiten bzw. Verhalten zu lernen oder eher abstraktes, aufgabenspezifisches<br />
Know-How zu erlangen 13 . In der ersten Kategorie wird ein Abbildungsmechanismus<br />
benötigt, um die Beziehungen zwischen Aktuatoraktionen und Sensordaten zu erlernen. Diese Aufgabe<br />
übernehmen in den meisten Fällen neuronale Netze. Diese PbD-Verfahren werden hauptsächlich<br />
eingesetzt, um die Abbildung von Kraftvektoren und Momente auf Roboterbewegungen zu erlernen<br />
[KD96] [KH95]. Weitere Anwendungen im Bereich der elementaren Fertigkeiten umfassen die<br />
Ultraschall-basierte Navigation von mobilen Plattformen [CS00], [YYW03]. Der Einsatz von PbD<br />
Verfahren ist jedoch nicht geeignet, um Visual Servoing zu erlernen. Der Roboter lernt zwar bildgestützte<br />
Imitationsbewegungen durchzuführen, wie in [AYH00], [ZRDZ02] und [JU02], kann aber<br />
die Bewegung nicht generalisieren. Das ist darauf zurückzuführen, dass das Erlernen von Kamera-<br />
Roboterarm-Bewegungen eine große Anzahl von Beispielen erfordert, wenn es über eine Nachahmung<br />
hinausgehen soll. Diese Beispiele können nicht auf praktikable Weise von einem Benutzer generiert<br />
werden. Auch die Erfassung der Daten ist problematisch, denn sie erfordert eine große Anzahl<br />
von Sensoren.<br />
2.2.2 Reaktive Hindernisvermeidung für Manipulatoren<br />
Die reaktive Hindernisvermeidung hat als Aufgabe, sowohl für den Greifer als auch für die Segmente<br />
des Manipulators Ausweichbewegungen zu berechnen, um sie vor Kollisionen zu schützen. Der<br />
Forschungsbereich ist mit der Pfadplanung eng verwandt (siehe Abschnitt 2.4.2). Er unterscheidet<br />
sich jedoch bezüglich der Reaktivität. Die meisten Pfadplanungsalgorithmen gehen davon aus, dass<br />
die Umgebung entweder bekannt oder mit Sensorik genau erfasst ist und sich während der Manipulationsphase<br />
nicht ändert. Wenige Planungsansätze berücksichtigen auch eine nur teilweise bekannte<br />
Arbeitsumgebung, die aber bei mobilen Manipulatoren oft vorkommt. In diesem Fall muss der Roboter<br />
reaktiv neu erfasste Hindernisse vermeiden; eine ständige Neuplanung ist zu aufwendig.<br />
13 Da man bei der Akquisition von aufgabenspezifischem Know-How von einer Menge vorhandener elementarer Fertigkeiten<br />
ausgeht, die nicht erlernt werden [ERZD01], wird diese Gruppe von PbD-Ansätzen hier nicht weiter behandelt.














