

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
94 4.2 Hindernisvermeidung<br />
Fall Anzahl %<br />
Erfolgreiche Ausführung des Szenarios 9684 96, 84%<br />
Kollision mit Hindernis<br />
Hindernisabstand zu Beginn ≤ 8 cm<br />
Hindernisabstand zu Beginn > 8 cm<br />
297<br />
19<br />
2, 97%<br />
0, 19%<br />
Tabelle 4.4: Evaluierung der Hindernisvermeidung des Greifers in der virtuellen Umgebung.<br />
4.2.3 Hindernisvermeidung der Manipulatorsegmente<br />
Die Hindernisvermeidung des Greifers kann den Endeffektor, jedoch nicht die restlichen Segmente<br />
des Manipulators vor Kollisionen schützen. Deswegen ist ein zusätzliches Verhalten notwendig, das<br />
in der Nähe von Hindernissen eine Ausweichbewegung für die Manipulatorsegmente berechnet.<br />
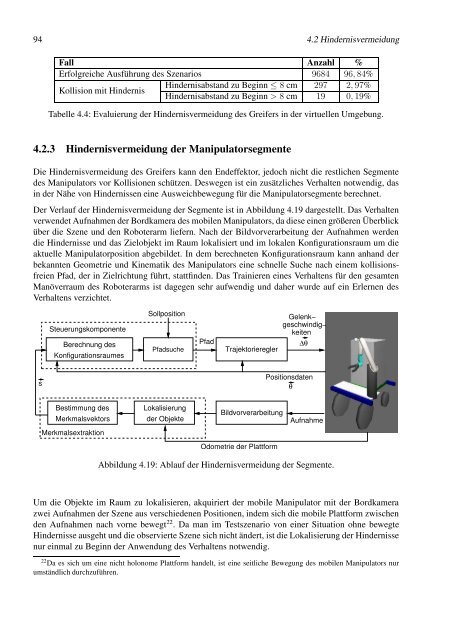
Der Verlauf der Hindernisvermeidung der Segmente ist in Abbildung 4.19 dargestellt. Das Verhalten<br />
verwendet Aufnahmen der Bordkamera des mobilen Manipulators, da diese einen größeren Überblick<br />
über die Szene und den Roboterarm liefern. Nach der Bildvorverarbeitung der Aufnahmen werden<br />
die Hindernisse und das Zielobjekt im Raum lokalisiert und im lokalen Konfigurationsraum um die<br />
aktuelle Manipulatorposition abgebildet. In dem berechneten Konfigurationsraum kann anhand der<br />
bekannten Geometrie und Kinematik des Manipulators eine schnelle Suche nach einem kollisionsfreien<br />
Pfad, der in Zielrichtung führt, stattfinden. Das Trainieren eines Verhaltens für den gesamten<br />
Manöverraum des Roboterarms ist dagegen sehr aufwendig und daher wurde auf ein Erlernen des<br />
Verhaltens verzichtet.<br />
s<br />
Steuerungskomponente<br />
Berechnung des<br />
Konfigurationsraumes<br />
Bestimmung des<br />
Merkmalsvektors<br />
Merkmalsextraktion<br />
Sollposition<br />
Pfadsuche<br />
Lokalisierung<br />
der Objekte<br />
Pfad<br />
Trajektorieregler<br />
Bildvorverarbeitung<br />
Odometrie der Plattform<br />
Gelenk−<br />
geschwindig−<br />
keiten<br />
∆θ<br />
Positionsdaten<br />
θ<br />
Aufnahme<br />
Abbildung 4.19: Ablauf der Hindernisvermeidung der Segmente.<br />
Um die Objekte im Raum zu lokalisieren, akquiriert der mobile Manipulator mit der Bordkamera<br />
zwei Aufnahmen der Szene aus verschiedenen Positionen, indem sich die mobile Plattform zwischen<br />
den Aufnahmen nach vorne bewegt 22 . Da man im Testszenario von einer Situation ohne bewegte<br />
Hindernisse ausgeht und die observierte Szene sich nicht ändert, ist die Lokalisierung der Hindernisse<br />
nur einmal zu Beginn der Anwendung des Verhaltens notwendig.<br />
22 Da es sich um eine nicht holonome Plattform handelt, ist eine seitliche Bewegung des mobilen Manipulators nur<br />
umständlich durchzuführen.














