

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
74 4.1 Bildgestützte Zielführung<br />
(Trajectory) beinhaltet dagegen zusätzliche Information bezüglich der zeitlichen Ausführung der Bewegung;<br />
hier ist die erwünschte Position und Geschwindigkeit des Roboters zu jedem Zeitpunkt eindeutig<br />
definiert [Cra89]. Damit der Roboterarm einen Pfad, den ein Verhalten ermittelt hat, abfahren<br />
kann, muss er ihn in eine Trajektorie transformieren, die er dann mit Hilfe eines Trajektoriereglers 2<br />
ausführt. Der resultierende Gesamtpfad wird anschließend mit dem Trajektorieregler, der in Anhang<br />
C.1 zusammengefasst ist, ausgeführt.<br />
s<br />
Steuerungskomponente<br />
Merkmalsextraktion<br />
Pfad<br />
Trajektorieregler<br />
Bildvorverarbeitung<br />
zum Abgleich mit den<br />
virtuellen Kameras<br />
Gelenk−<br />
geschwindig−<br />
keiten<br />
∆θ<br />
Positionsdaten<br />
θ<br />
Aufnahme<br />
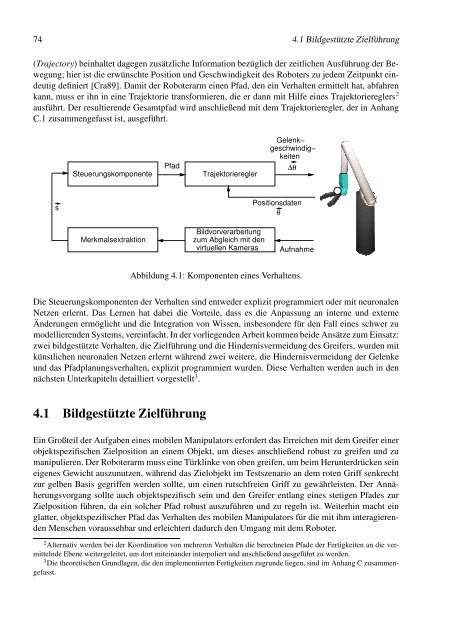
Abbildung 4.1: Komponenten eines Verhaltens.<br />
Die Steuerungskomponenten der Verhalten sind entweder explizit programmiert oder mit neuronalen<br />
Netzen erlernt. Das Lernen hat dabei die Vorteile, dass es die Anpassung an interne und externe<br />
Änderungen ermöglicht und die Integration von Wissen, insbesondere für den Fall eines schwer zu<br />
modellierenden Systems, vereinfacht. In der vorliegenden Arbeit kommen beide Ansätze zum Einsatz:<br />
zwei bildgestützte Verhalten, die Zielführung und die Hindernisvermeidung des Greifers, wurden mit<br />
künstlichen neuronalen Netzen erlernt während zwei weitere, die Hindernisvermeidung der Gelenke<br />
und das Pfadplanungsverhalten, explizit programmiert wurden. Diese Verhalten werden auch in den<br />
nächsten Unterkapiteln detailliert vorgestellt 3 .<br />
4.1 Bildgestützte Zielführung<br />
Ein Großteil der Aufgaben eines mobilen Manipulators erfordert das Erreichen mit dem Greifer einer<br />
objektspezifischen Zielposition an einem Objekt, um dieses anschließend robust zu greifen und zu<br />
manipulieren. Der Roboterarm muss eine Türklinke von oben greifen, um beim Herunterdrücken sein<br />
eigenes Gewicht auszunutzen, während das Zielobjekt im Testszenario an dem roten Griff senkrecht<br />
zur gelben Basis gegriffen werden sollte, um einen rutschfreien Griff zu gewährleisten. Der Annäherungsvorgang<br />
sollte auch objektspezifisch sein und den Greifer entlang eines stetigen Pfades zur<br />
Zielposition führen, da ein solcher Pfad robust auszuführen und zu regeln ist. Weiterhin macht ein<br />
glatter, objektspezifischer Pfad das Verhalten des mobilen Manipulators für die mit ihm interagierenden<br />
Menschen voraussehbar und erleichtert dadurch den Umgang mit dem Roboter.<br />
2 Alternativ werden bei der Koordination von mehreren Verhalten die berechneten Pfade der Fertigkeiten an die vermittelnde<br />
Ebene weitergeleitet, um dort miteinander interpoliert und anschließend ausgeführt zu werden.<br />
3 Die theoretischen Grundlagen, die den implementierten Fertigkeiten zugrunde liegen, sind im Anhang C zusammen-<br />
gefasst.














