

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
116 5.3 Verhaltenskoordination<br />
Abkürzung Beschreibung Diskretisierungsintervalle<br />
KV Anwendbarkeit der Kollisionsvermeidung { 0, 0.1, 0.2,..., 1.0}<br />
dGH Abstand des Greifers zum Hindernis { 0, 20, 50, 90, 1000} in mm<br />
˙<br />
dGH Änderung des Abstandes Greifer - Hindernis { -300, -10, 0, 10, 300} in mm<br />
φGH Winkel Greiferbewegung - Hindernis { 0, 10, 30, 60, 180} in Grad<br />
dGT Abstand des Greifers zur Auflagefläche { 0, 20, 50, 90, 1000} in mm<br />
dGZ Abstand des Greifers zum Ziel { 0, 20, 50, 90, 1000} in mm<br />
φGT Winkel Greiferbewegung - Auflagefläche { 0, 10, 30, 60, 180} in Grad<br />
Tabelle 5.3: Beschreibung der Merkmale und der Diskretisierungsintervalle des BBNs für die Hindernisvermeidung<br />
des Greifers<br />
nauigkeit in der Berechnung der Anwendbarkeit erreicht. Dies betrifft vor allem den Abstand zu den<br />
Hindernissen und der Auflagefläche, so dass eine kleine Distanz, gleichbedeutend mit einer hohen<br />
Kollisionsgefahr, besser aufgelöst ist.<br />
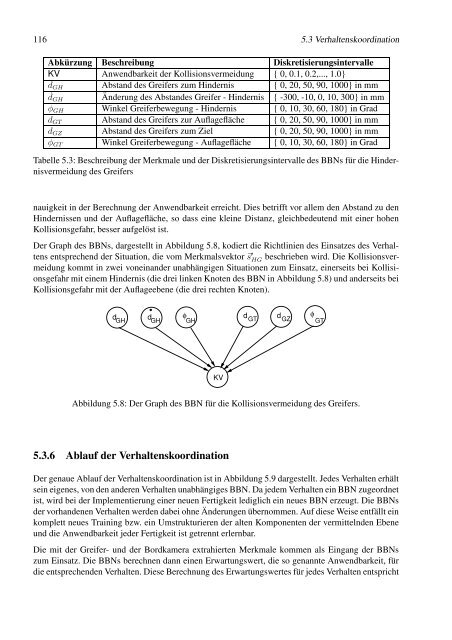
Der Graph des BBNs, dargestellt in Abbildung 5.8, kodiert die Richtlinien des Einsatzes des Verhaltens<br />
entsprechend der Situation, die vom Merkmalsvektor �s ′ HG beschrieben wird. Die Kollisionsvermeidung<br />
kommt in zwei voneinander unabhängigen Situationen zum Einsatz, einerseits bei Kollisionsgefahr<br />
mit einem Hindernis (die drei linken Knoten des BBN in Abbildung 5.8) und anderseits bei<br />
Kollisionsgefahr mit der Auflageebene (die drei rechten Knoten).<br />
d d φ<br />
d d φ<br />
GH GH GH GT GZ GT<br />
KV<br />
Abbildung 5.8: Der Graph des BBN für die Kollisionsvermeidung des Greifers.<br />
5.3.6 Ablauf der Verhaltenskoordination<br />
Der genaue Ablauf der Verhaltenskoordination ist in Abbildung 5.9 dargestellt. Jedes Verhalten erhält<br />
sein eigenes, von den anderen Verhalten unabhängiges BBN. Da jedem Verhalten ein BBN zugeordnet<br />
ist, wird bei der Implementierung einer neuen Fertigkeit lediglich ein neues BBN erzeugt. Die BBNs<br />
der vorhandenen Verhalten werden dabei ohne Änderungen übernommen. Auf diese Weise entfällt ein<br />
komplett neues Training bzw. ein Umstrukturieren der alten Komponenten der vermittelnden Ebene<br />
und die Anwendbarkeit jeder Fertigkeit ist getrennt erlernbar.<br />
Die mit der Greifer- und der Bordkamera extrahierten Merkmale kommen als Eingang der BBNs<br />
zum Einsatz. Die BBNs berechnen dann einen Erwartungswert, die so genannte Anwendbarkeit, für<br />
die entsprechenden Verhalten. Diese Berechnung des Erwartungswertes für jedes Verhalten entspricht














