

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
136 6.5 Geometrische Planung<br />
6.5.1 Pfadplanung für die mobile Plattform<br />
Mit der Pfadplanung ist es möglich, Wege von einem Start- zu einem Zielpunkt für die mobile Plattform<br />
zu berechnen. Beim eingesetzten Pfadplaner handelt es sich um ein Probabilistic Roadmap<br />
Verfahren, das auf dem im Abschnitt 4.3.2 beschriebenen Pfadsucheansatz basiert. Allerdings findet<br />
hier die Pfadsuche im zweidimensionalen Raum statt, da nur die Bewegung der Plattform zu berücksichtigen<br />
ist. Die geometrische Darstellung der Einsatzumgebung (Abbildung 6.3) liegt als Karte 3 in<br />
der Weltdatenbank vor.<br />
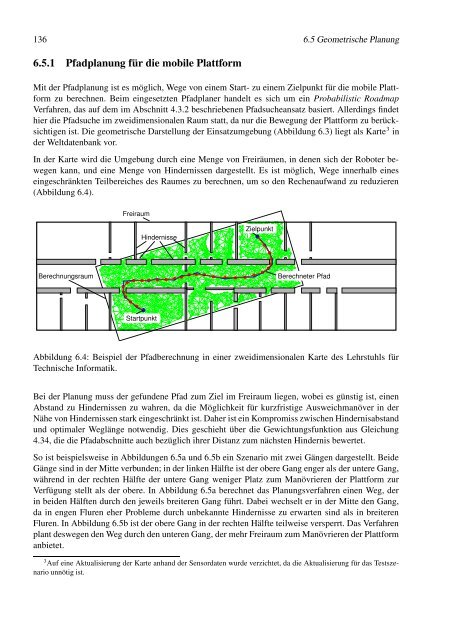
In der Karte wird die Umgebung durch eine Menge von Freiräumen, in denen sich der Roboter bewegen<br />
kann, und eine Menge von Hindernissen dargestellt. Es ist möglich, Wege innerhalb eines<br />
eingeschränkten Teilbereiches des Raumes zu berechnen, um so den Rechenaufwand zu reduzieren<br />
(Abbildung 6.4).<br />
Berechnungsraum<br />
Freiraum<br />
Hindernisse<br />
Startpunkt<br />
Zielpunkt<br />
Berechneter Pfad<br />
Abbildung 6.4: Beispiel der Pfadberechnung in einer zweidimensionalen Karte des Lehrstuhls für<br />
Technische Informatik.<br />
Bei der Planung muss der gefundene Pfad zum Ziel im Freiraum liegen, wobei es günstig ist, einen<br />
Abstand zu Hindernissen zu wahren, da die Möglichkeit für kurzfristige Ausweichmanöver in der<br />
Nähe von Hindernissen stark eingeschränkt ist. Daher ist ein Kompromiss zwischen Hindernisabstand<br />
und optimaler Weglänge notwendig. Dies geschieht über die Gewichtungsfunktion aus Gleichung<br />
4.34, die die Pfadabschnitte auch bezüglich ihrer Distanz zum nächsten Hindernis bewertet.<br />
So ist beispielsweise in Abbildungen 6.5a und 6.5b ein Szenario mit zwei Gängen dargestellt. Beide<br />
Gänge sind in der Mitte verbunden; in der linken Hälfte ist der obere Gang enger als der untere Gang,<br />
während in der rechten Hälfte der untere Gang weniger Platz zum Manövrieren der Plattform zur<br />
Verfügung stellt als der obere. In Abbildung 6.5a berechnet das Planungsverfahren einen Weg, der<br />
in beiden Hälften durch den jeweils breiteren Gang führt. Dabei wechselt er in der Mitte den Gang,<br />
da in engen Fluren eher Probleme durch unbekannte Hindernisse zu erwarten sind als in breiteren<br />
Fluren. In Abbildung 6.5b ist der obere Gang in der rechten Hälfte teilweise versperrt. Das Verfahren<br />
plant deswegen den Weg durch den unteren Gang, der mehr Freiraum zum Manövrieren der Plattform<br />
anbietet.<br />
3 Auf eine Aktualisierung der Karte anhand der Sensordaten wurde verzichtet, da die Aktualisierung für das Testsze-<br />
nario unnötig ist.














