

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
78 4.1 Bildgestützte Zielführung<br />
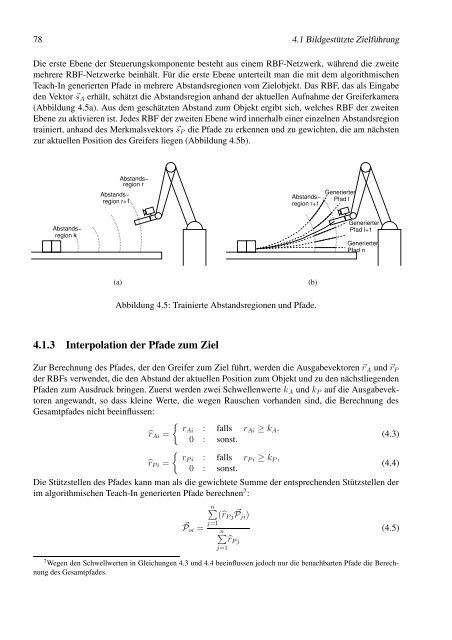
Die erste Ebene der Steuerungskomponente besteht aus einem RBF-Netzwerk, während die zweite<br />
mehrere RBF-Netzwerke beinhält. Für die erste Ebene unterteilt man die mit dem algorithmischen<br />
Teach-In generierten Pfade in mehrere Abstandsregionen vom Zielobjekt. Das RBF, das als Eingabe<br />
den Vektor �sA erhält, schätzt die Abstandsregion anhand der aktuellen Aufnahme der Greiferkamera<br />
(Abbildung 4.5a). Aus dem geschätzten Abstand zum Objekt ergibt sich, welches RBF der zweiten<br />
Ebene zu aktivieren ist. Jedes RBF der zweiten Ebene wird innerhalb einer einzelnen Abstandsregion<br />
trainiert, anhand des Merkmalsvektors �sP die Pfade zu erkennen und zu gewichten, die am nächsten<br />
zur aktuellen Position des Greifers liegen (Abbildung 4.5b).<br />
Abstands−<br />
region k<br />
Abstands−<br />
region r+1<br />
(a)<br />
Abstands−<br />
region r<br />
Abbildung 4.5: Trainierte Abstandsregionen und Pfade.<br />
4.1.3 Interpolation der Pfade zum Ziel<br />
Generierter<br />
Abstands− Pfad l<br />
region r+1<br />
(b)<br />
Generierter<br />
Pfad l+1<br />
Generierter<br />
Pfad n<br />
Zur Berechnung des Pfades, der den Greifer zum Ziel führt, werden die Ausgabevektoren �rA und �rP<br />
der RBFs verwendet, die den Abstand der aktuellen Position zum Objekt und zu den nächstliegenden<br />
Pfaden zum Ausdruck bringen. Zuerst werden zwei Schwellenwerte kA und kP auf die Ausgabevektoren<br />
angewandt, so dass kleine Werte, die wegen Rauschen vorhanden sind, die Berechnung des<br />
Gesamtpfades nicht beeinflussen:<br />
�<br />
rAi : falls rAi ≥ kA,<br />
�rAi =<br />
(4.3)<br />
0 : sonst.<br />
�<br />
rP i : falls rP i ≥ kP ,<br />
�rP i =<br />
(4.4)<br />
0 : sonst.<br />
Die Stützstellen des Pfades kann man als die gewichtete Summe der entsprechenden Stützstellen der<br />
im algorithmischen Teach-In generierten Pfade berechnen7 :<br />
n�<br />
(�rP j<br />
j=1<br />
�Poi =<br />
� Pji)<br />
n�<br />
�rP j<br />
j=1<br />
7 Wegen den Schwellwerten in Gleichungen 4.3 und 4.4 beeinflussen jedoch nur die benachbarten Pfade die Berech-<br />
nung des Gesamtpfades.<br />
(4.5)














