

Thesis - RWTH Aachen University
Thesis - RWTH Aachen University
Thesis - RWTH Aachen University

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
4.3 Pfadplanung im lokalen Manipulationsraum 101<br />
Sei also � dOi die Dimension und MB �pOi die Position von Hindernis Oi relativ zur Manipulator-Basis,<br />
�dG = (dGx, dGy, dGz) T die Dimension des Greifers und ω die Orientierung des Zielobjektes um die<br />
z-Achse der Manipulator-Basis. Dann ist die neue, vergrößerte Dimension des Hindernisses:<br />
und die angepasste Position:<br />
�d ′ Oi = � dOi<br />
⎛<br />
1<br />
+ ⎝<br />
2<br />
dGx |cos(ω)| +dGy<br />
dGx |sin(ω)| +dGy<br />
⎛<br />
MB ′<br />
�p Oi = MB �pOi + ⎝<br />
dGz<br />
dGx cos(ω)<br />
dGx sin(ω)<br />
0<br />
⎞<br />
⎞<br />
⎠ (4.29)<br />
⎠ (4.30)<br />
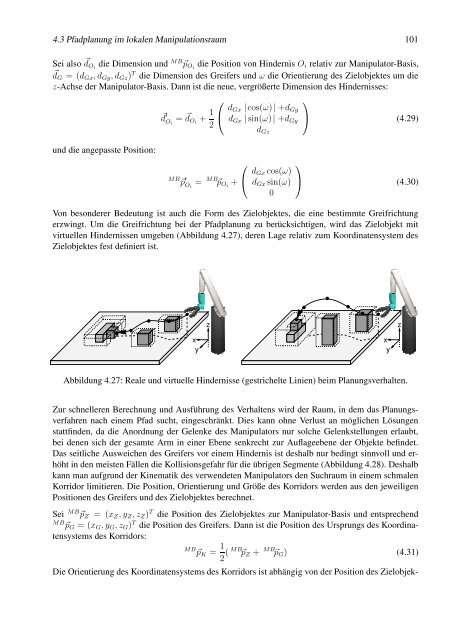
Von besonderer Bedeutung ist auch die Form des Zielobjektes, die eine bestimmte Greifrichtung<br />
erzwingt. Um die Greifrichtung bei der Pfadplanung zu berücksichtigen, wird das Zielobjekt mit<br />
virtuellen Hindernissen umgeben (Abbildung 4.27), deren Lage relativ zum Koordinatensystem des<br />
Zielobjektes fest definiert ist.<br />
x<br />
y<br />
z<br />
Abbildung 4.27: Reale und virtuelle Hindernisse (gestrichelte Linien) beim Planungsverhalten.<br />
Zur schnelleren Berechnung und Ausführung des Verhaltens wird der Raum, in dem das Planungsverfahren<br />
nach einem Pfad sucht, eingeschränkt. Dies kann ohne Verlust an möglichen Lösungen<br />
stattfinden, da die Anordnung der Gelenke des Manipulators nur solche Gelenkstellungen erlaubt,<br />
bei denen sich der gesamte Arm in einer Ebene senkrecht zur Auflageebene der Objekte befindet.<br />
Das seitliche Ausweichen des Greifers vor einem Hindernis ist deshalb nur bedingt sinnvoll und erhöht<br />
in den meisten Fällen die Kollisionsgefahr für die übrigen Segmente (Abbildung 4.28). Deshalb<br />
kann man aufgrund der Kinematik des verwendeten Manipulators den Suchraum in einem schmalen<br />
Korridor limitieren. Die Position, Orientierung und Größe des Korridors werden aus den jeweiligen<br />
Positionen des Greifers und des Zielobjektes berechnet.<br />
Sei MB �pZ = (xZ, yZ, zZ) T die Position des Zielobjektes zur Manipulator-Basis und entsprechend<br />
MB �pG = (xG, yG, zG) T die Position des Greifers. Dann ist die Position des Ursprungs des Koordina-<br />
tensystems des Korridors:<br />
MB �pK = 1<br />
2 ( MB �pZ + MB �pG) (4.31)<br />
Die Orientierung des Koordinatensystems des Korridors ist abhängig von der Position des Zielobjek-<br />
x<br />
y<br />
z














